Flow analysis using sUAS and lidar data
Helena Mitasova, Justyna Jeziorska, Anna Petrasova, Vaclav Petras, Thomas Zajkowski
North Carolina State University, Raleigh, NC
Center for Geospatial Analytics, Department of Marine, Earth and Atmospheric Sciences, NextGen Air Transportation
Wroclaw University, Poland
Advances in 3D mapping
- Lidar and sUAS: increased capacity to map 3D landscapes and assess the change on (almost) continuous basis
- Improved prediction of flooding and surface water flow
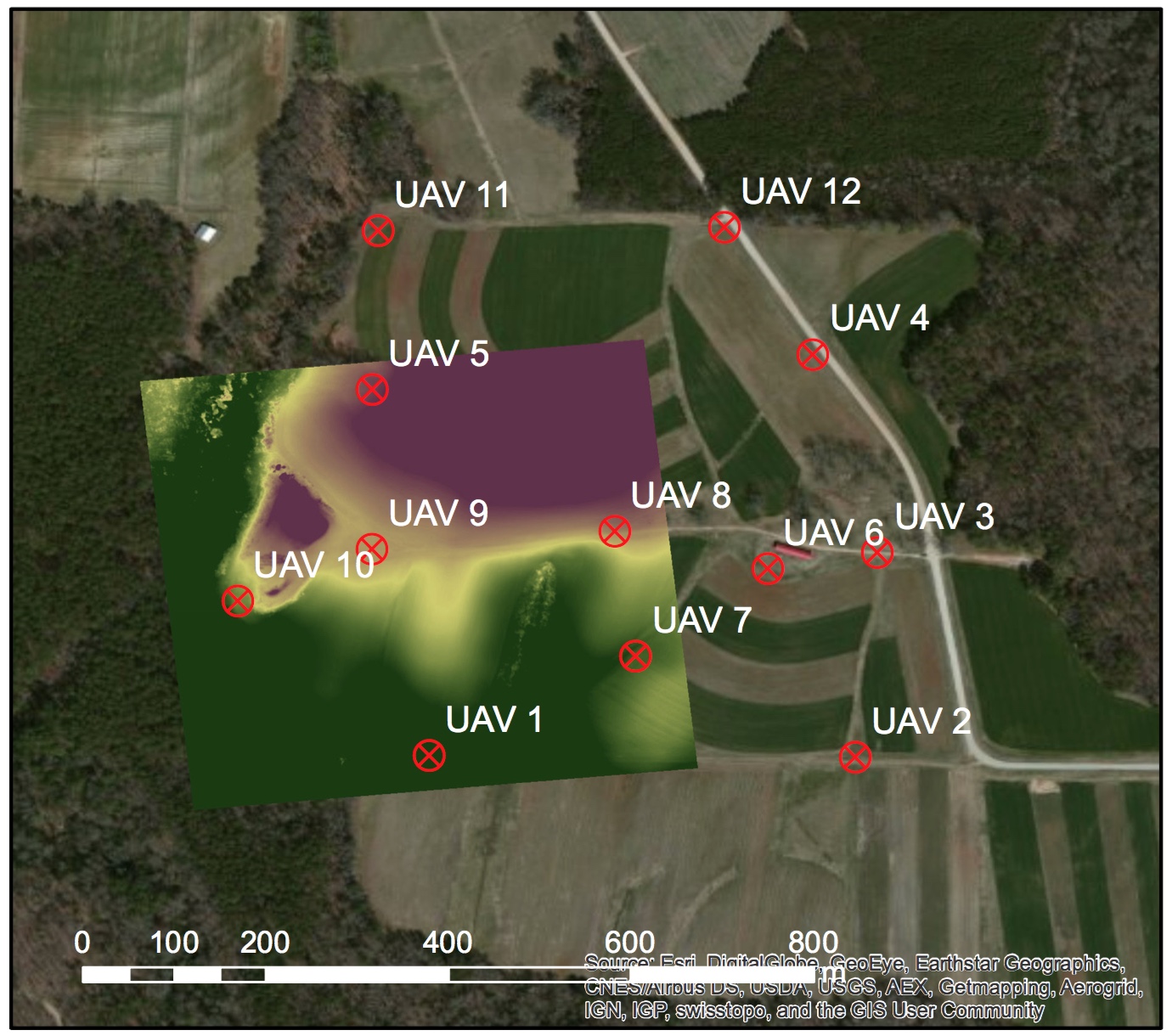
Study site
- NCSU experimental farms
- Surveyed by airborne lidar: 2001, 2013, 2015
- Test area for sUAS technologies
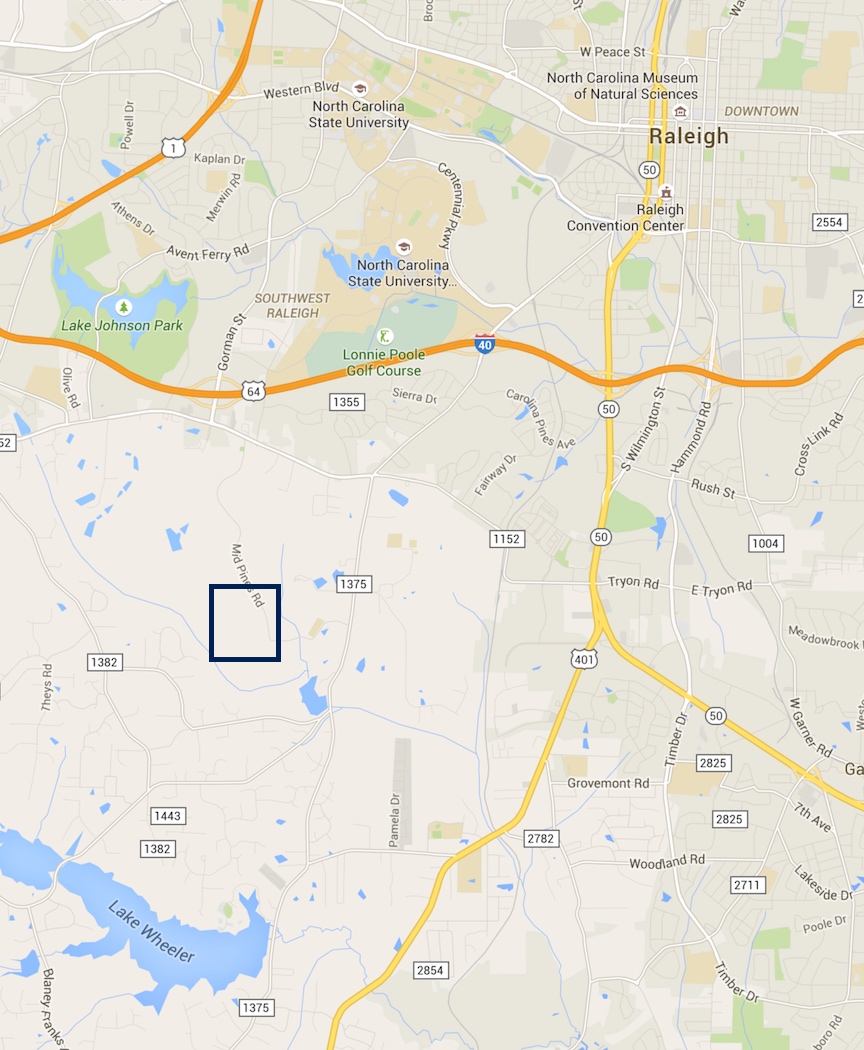
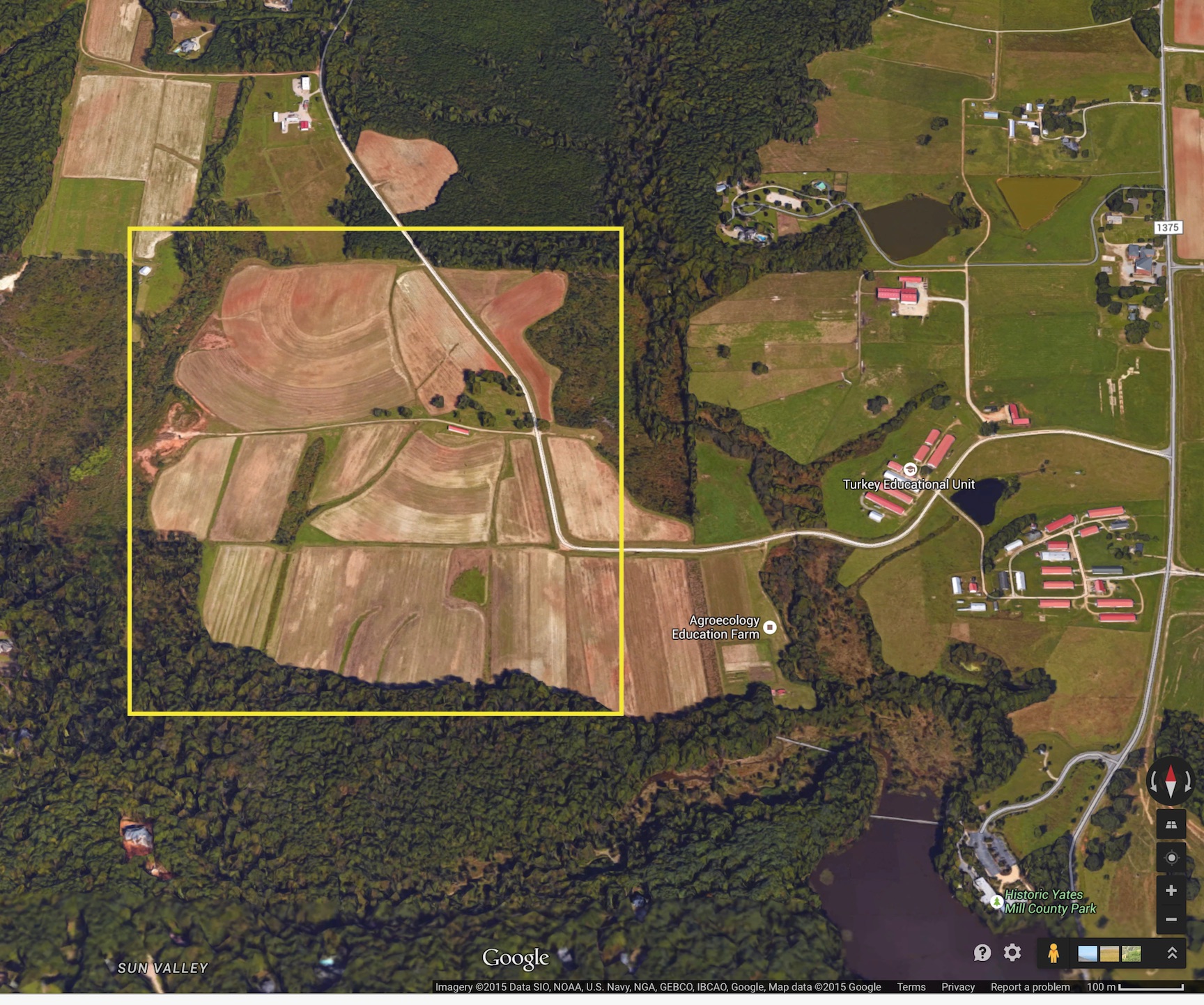
Image source: Google Maps
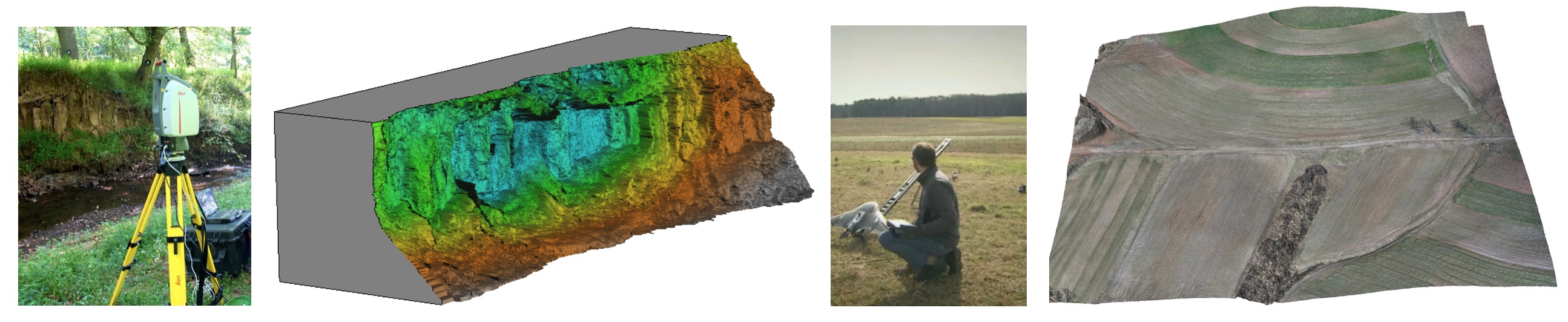
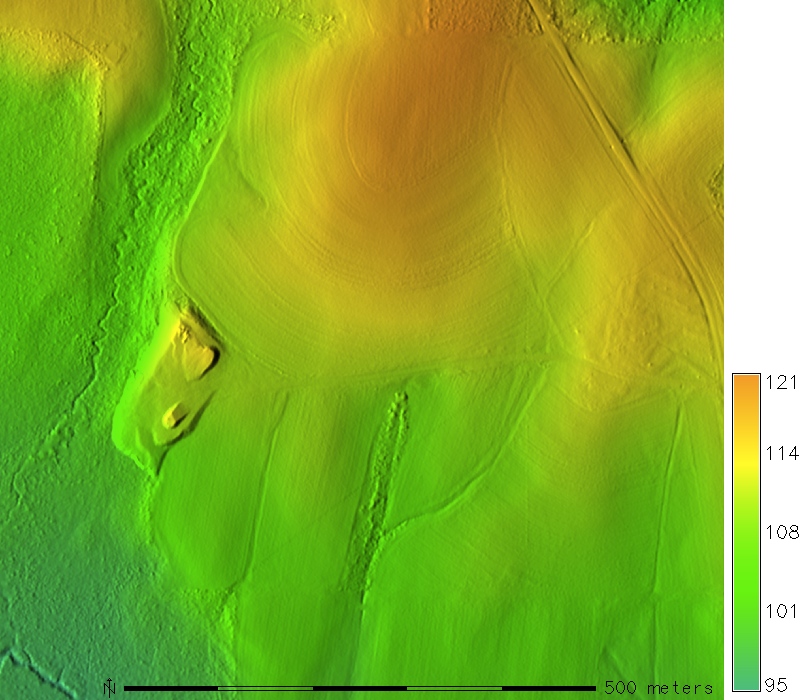
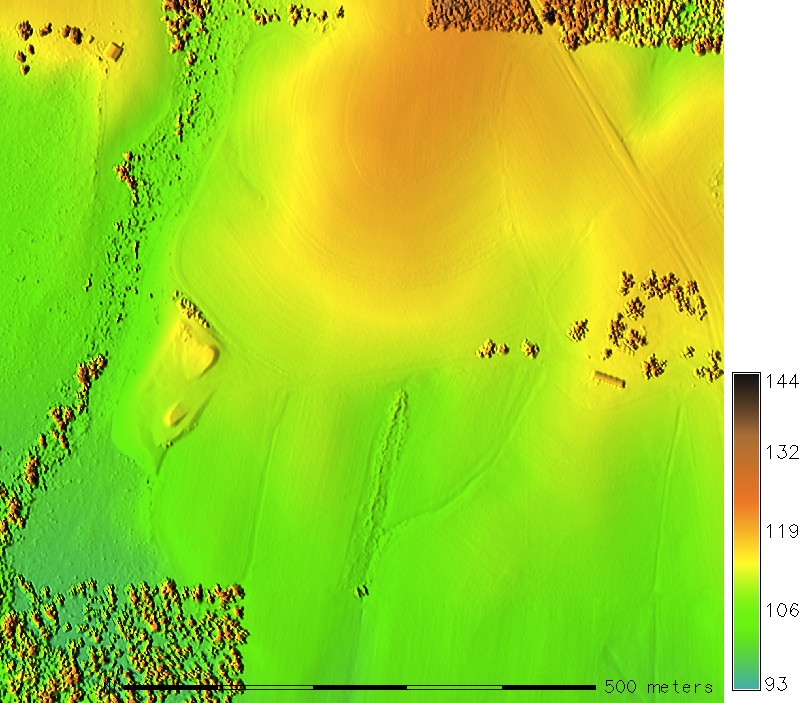
Lidar data
- Lidar survey by Leica ALS-70 in 2013
- multiple return point cloud with point density ~2 pts/m2
- DEM and DSM interpolated at 0.3m resolution
sUAS data
- Trimble UX5 system, flying at 138 m, camera 4900 x 3200
- Orthophoto 0.04 m resolution
- Digital Surface Model 0.15 m res, 172 pts/m2
- Repeated surveys for crop growth monitoring

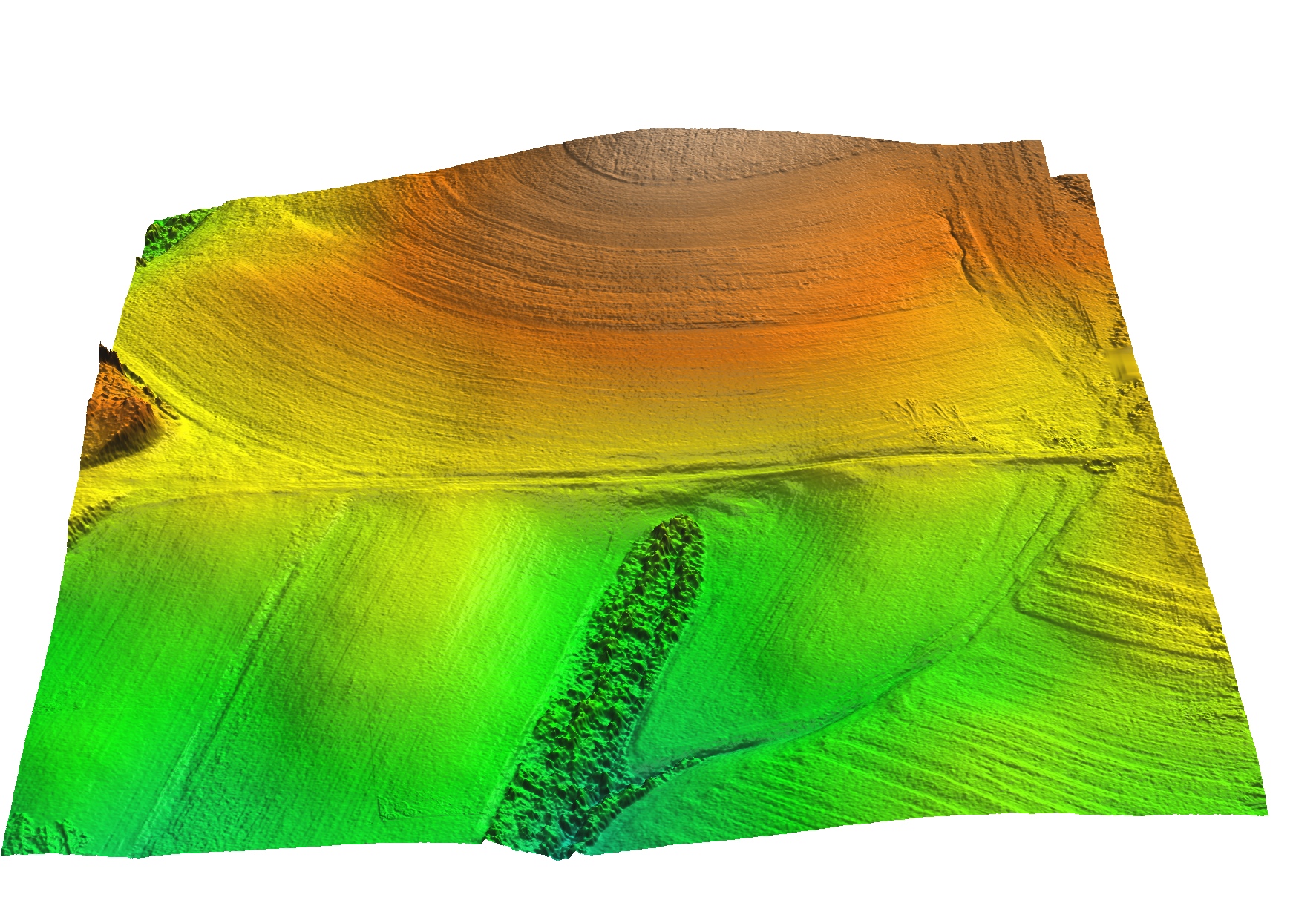
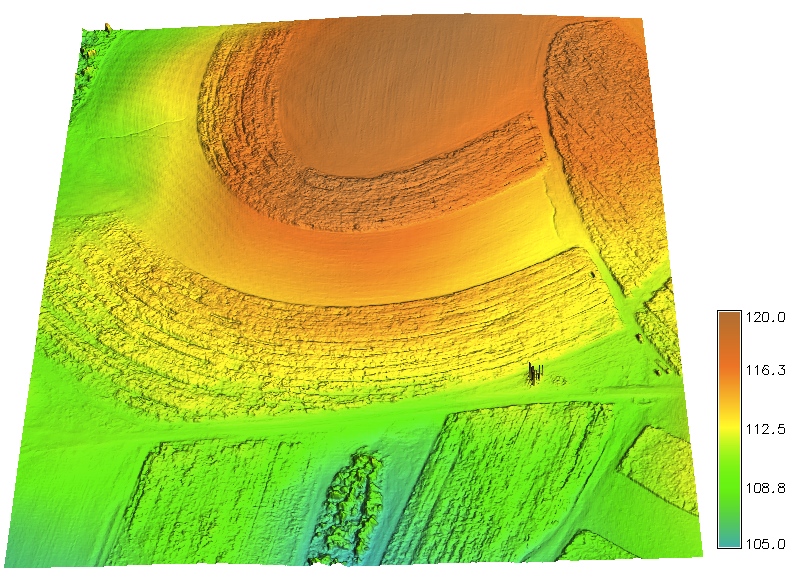
winter and summer DSM
sUAS data properties
- image overlap > 9, almost 1 million tie points
- processed by AGISOFT, Trimble, OpenDroneMap
- 11 GCPs installed to improve accuracy
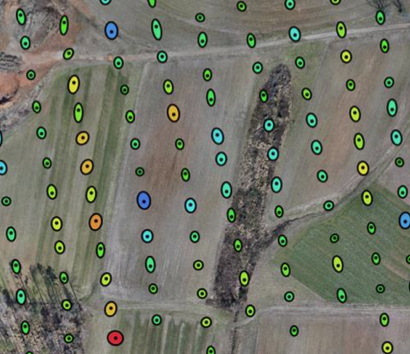
distribution of vertical and horizontal error, avg. camera error 0.3,1.9,0.6 m
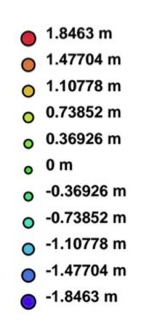
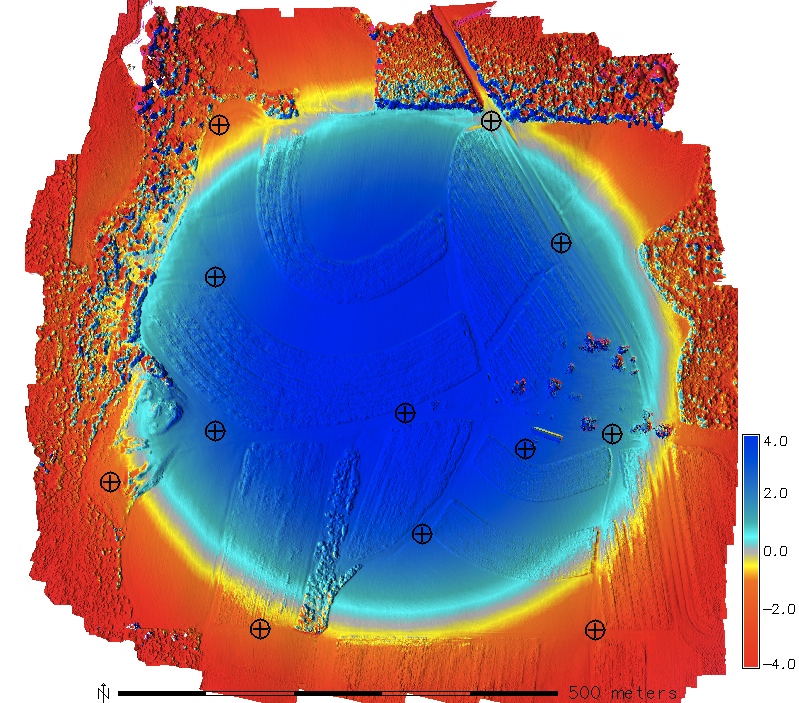
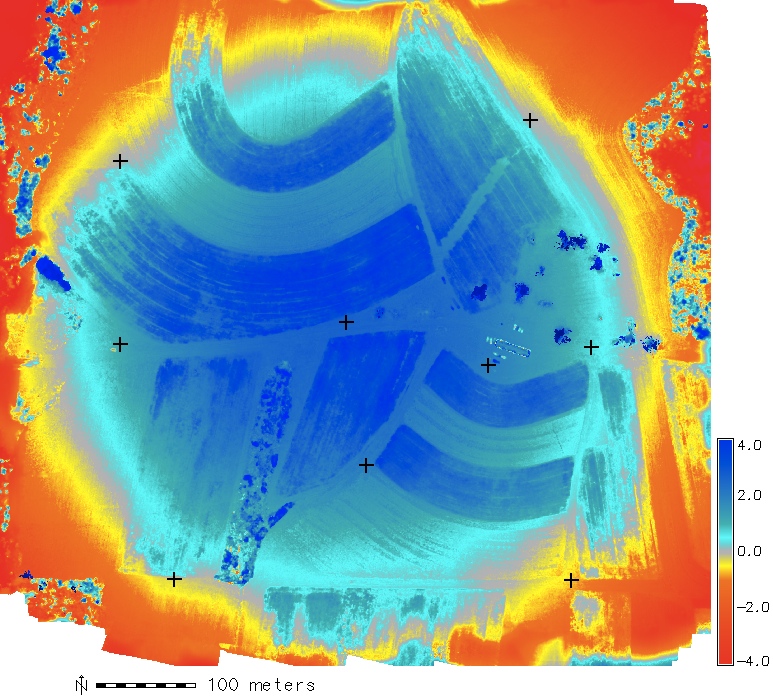
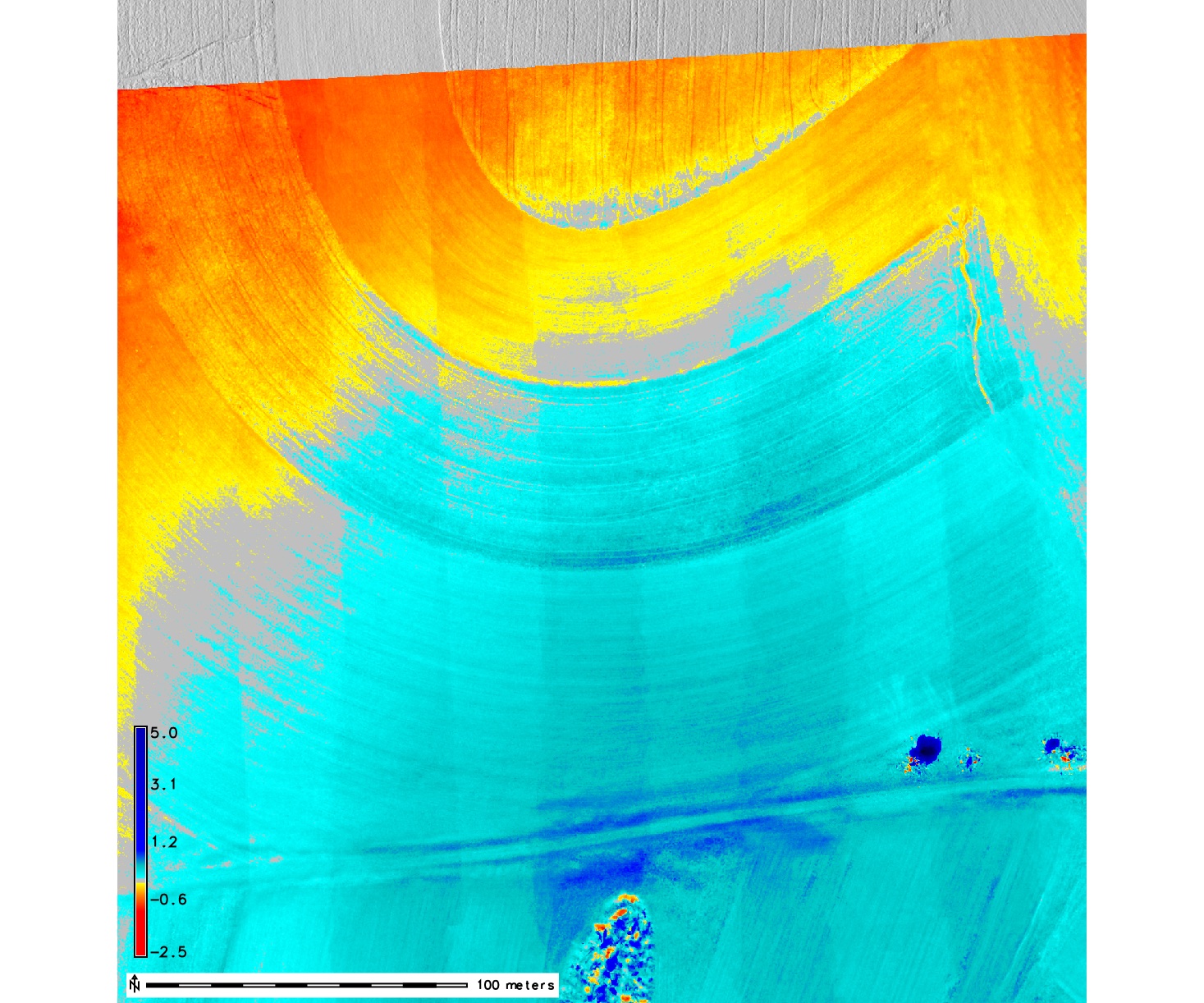
sUAS data processing: bowl effect
Difference between DSM processed without GCPs and with 11 GCPs (AGISOFT)
(mean=0.06m, mean_abs=2.8m)
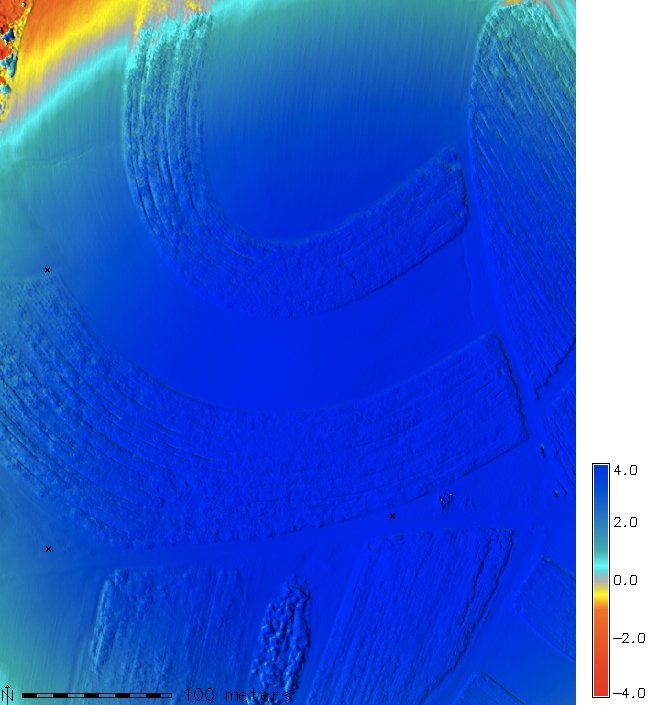
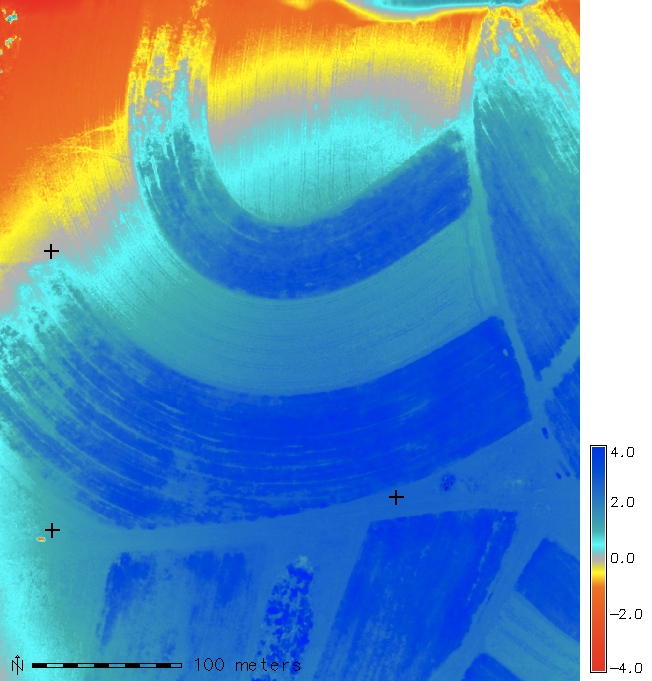
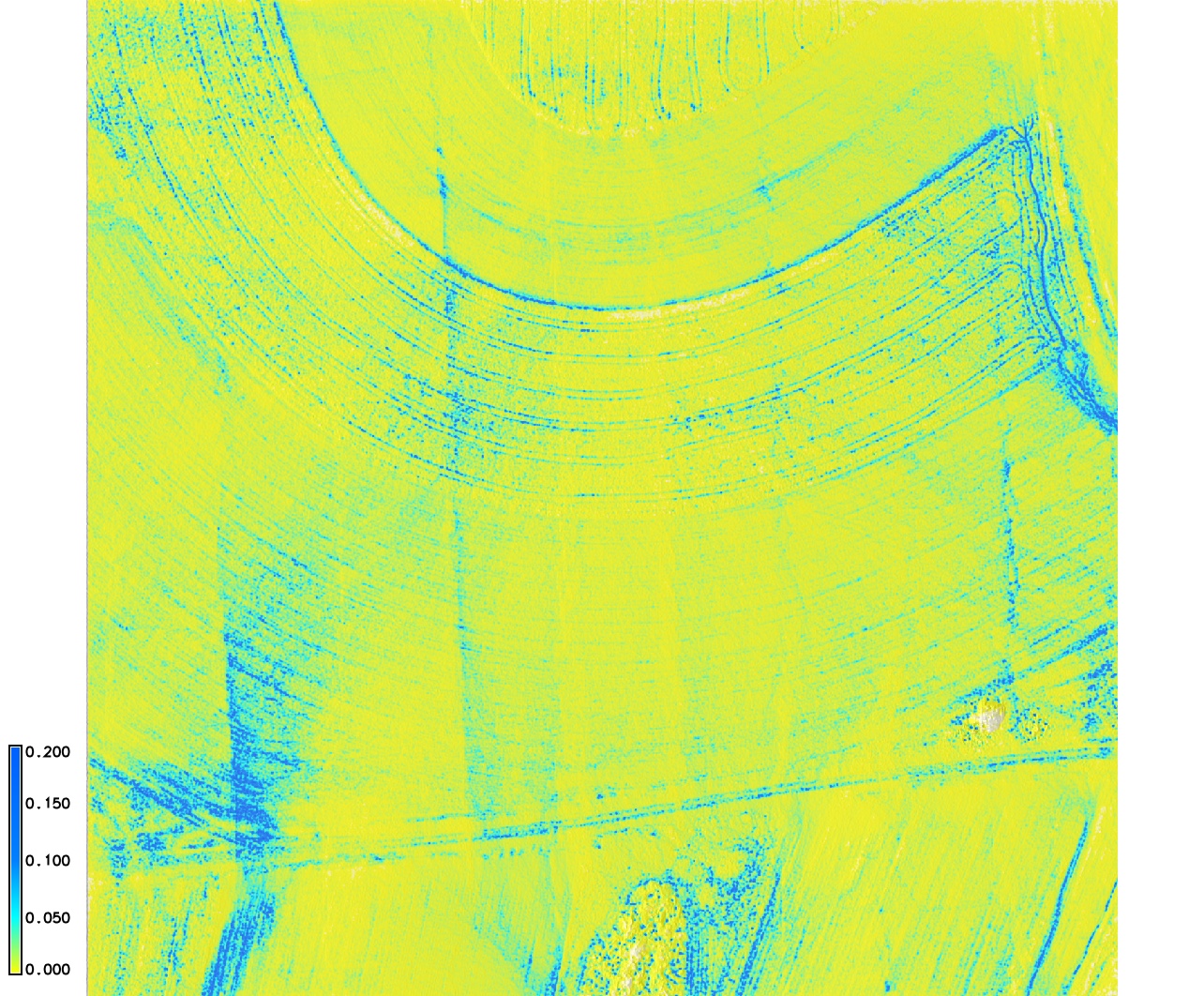
sUAS data processing comparison
Difference between DSM processed by AGISOFT with 11 GCPs and ODM with 6 GCPs
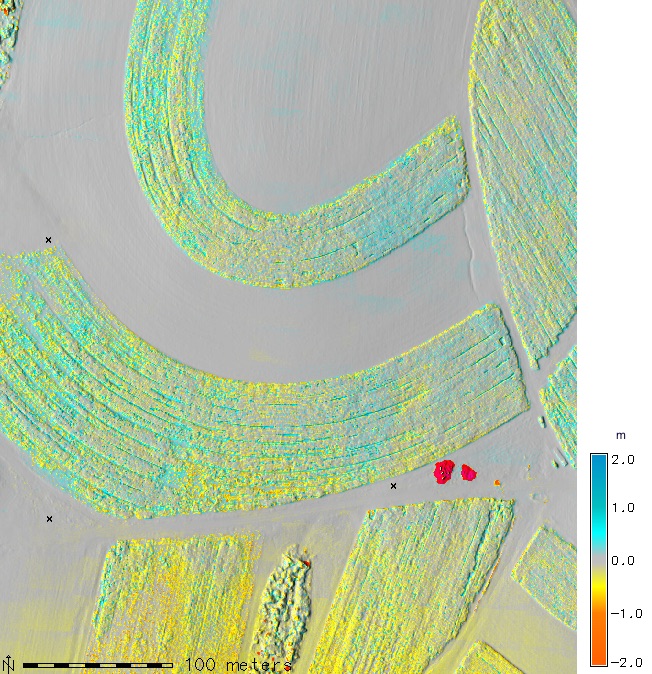
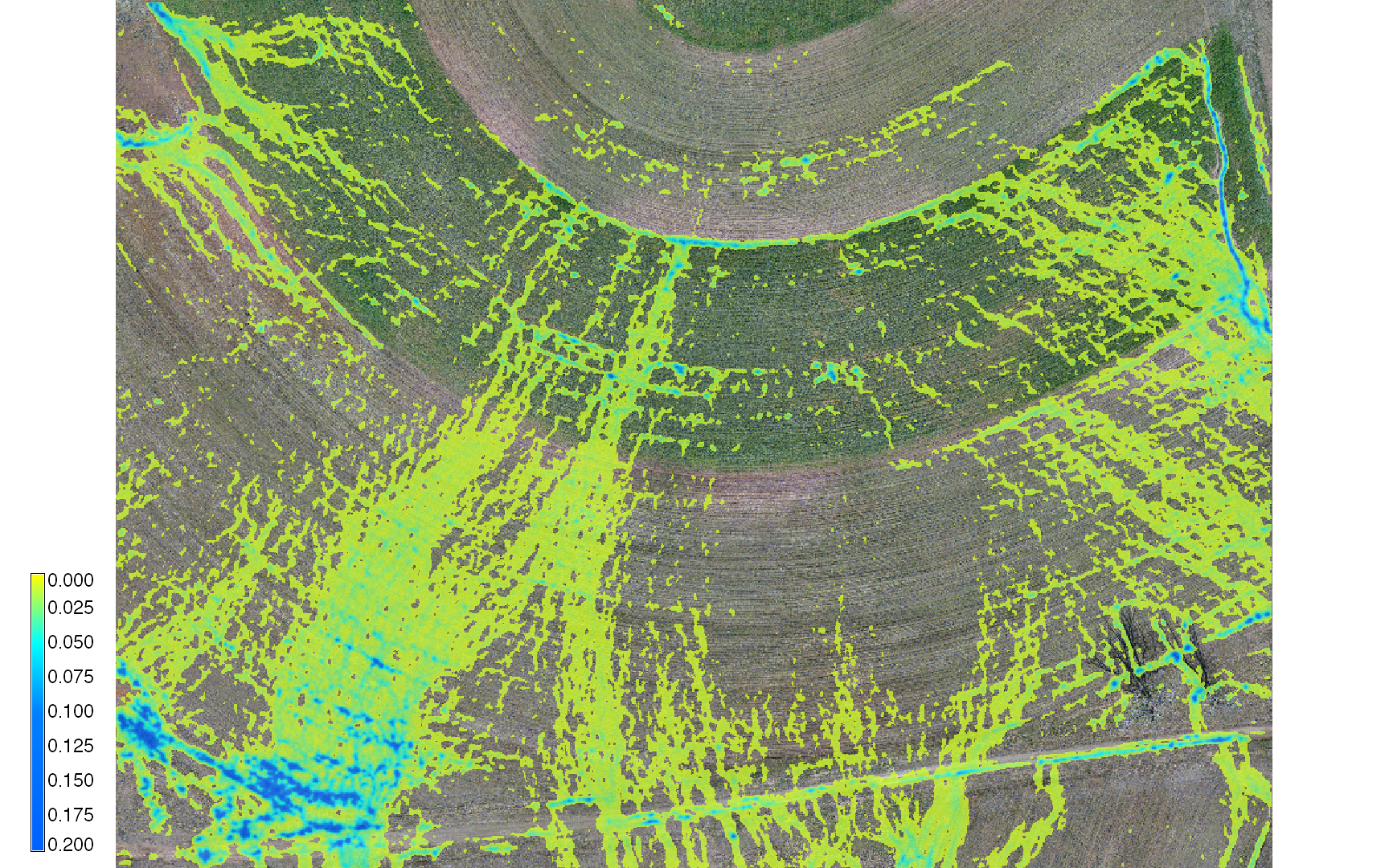
sUAS data processing comparison
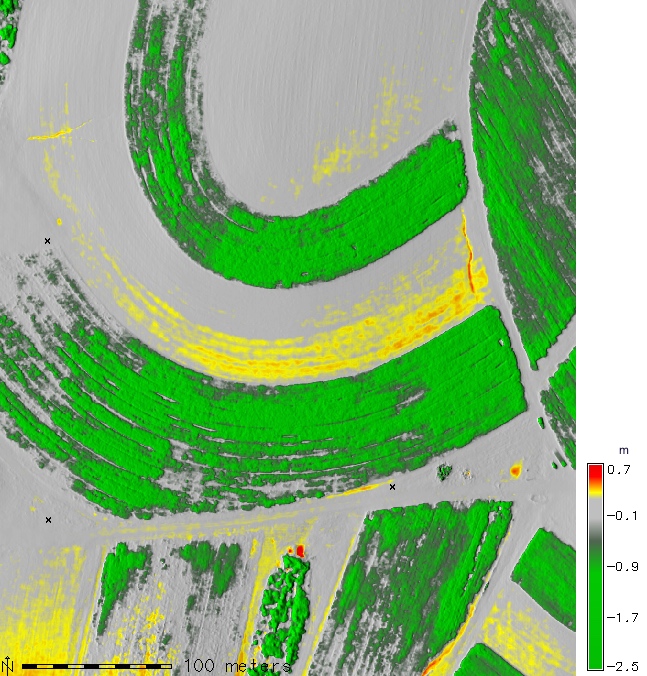
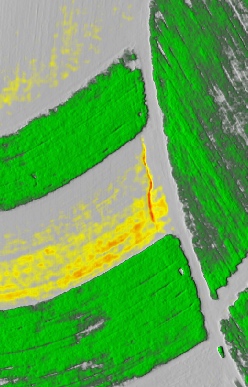
Difference between AGISOFT and Trimble (11 GCPs):mean=-0.14m, mean_abs=0.30m,
bare < 15cm dif, corn < 50cm dif, NS tilt
Lidar and sUAS data comparison
- Lidar bare 2013 - AGISOFT_GCP 2014: mean=-0.29m, mean_abs=0.40m
- reflects mapping errors and terrain/vegetation changes
LCP MFD flowrouting
- DSMs with many true depressions
- least cost path method (LCP): no depression filling
- multiple flow direction (MFD) routing: captures flow dispersion
Flow pattern analysis based on sUAS DSM
- LCP MFD flowtracing - includes dispersed water but no accumulated water in depressions
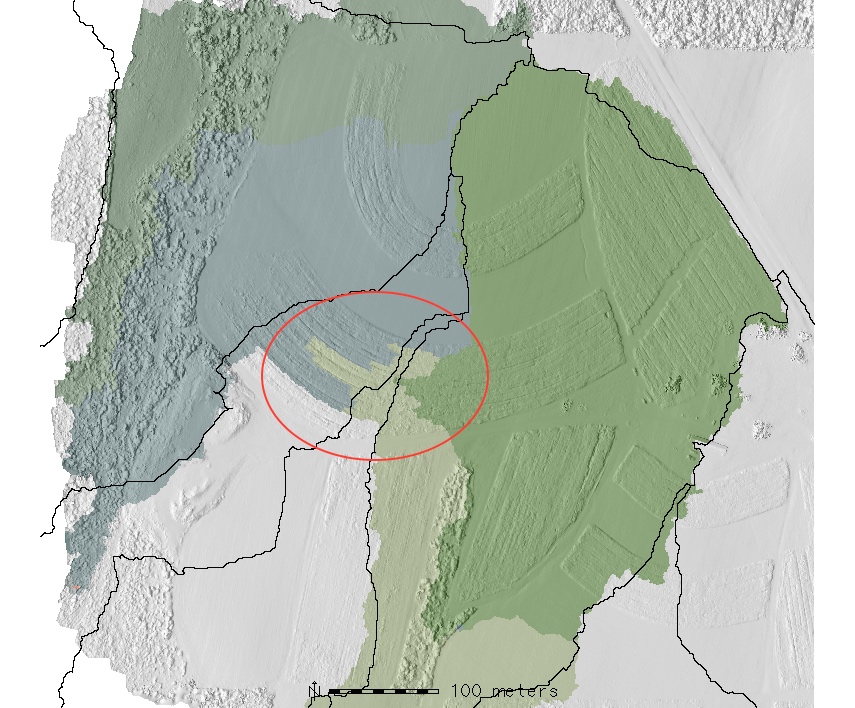
Watersheds from lidar and sUAS DSM
Watershed boundaries derived on sUAS data (color) and lidar (lines): tillage impact is captured by sUAS
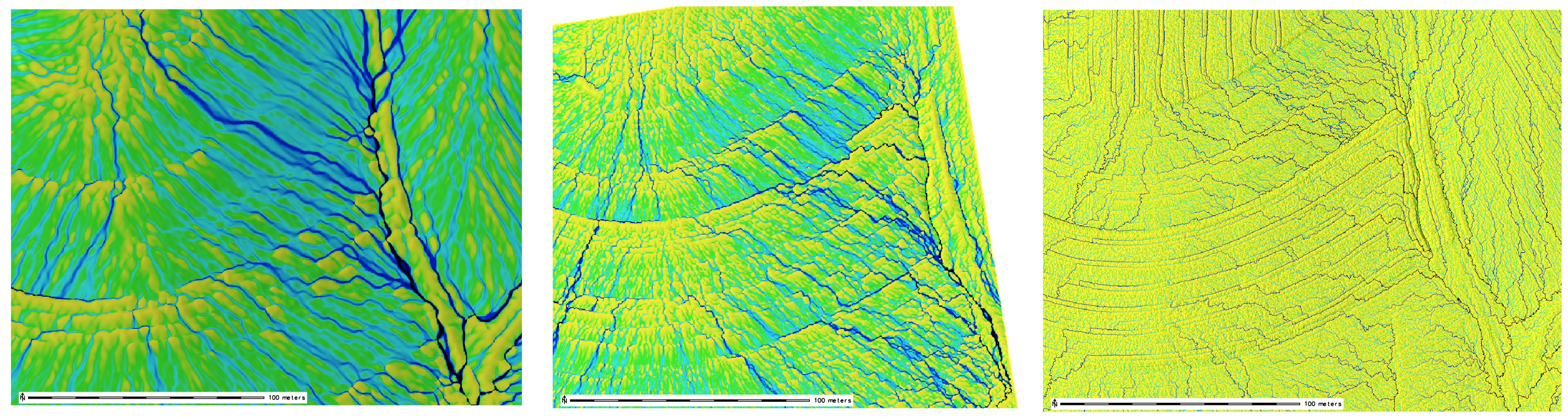
LCP MFD flowaccumulation: lidar, sUAS
- level of detail and noise influence the LCP MFD flowrouting (0.3m, 0.3m, 0.18m)
- tillage impact can be modeled directly, based on microtopography captured by sUAS
Path sampling method for flow simulations
Robust stochastic method for rough surfaces implemented in GRASS GIS
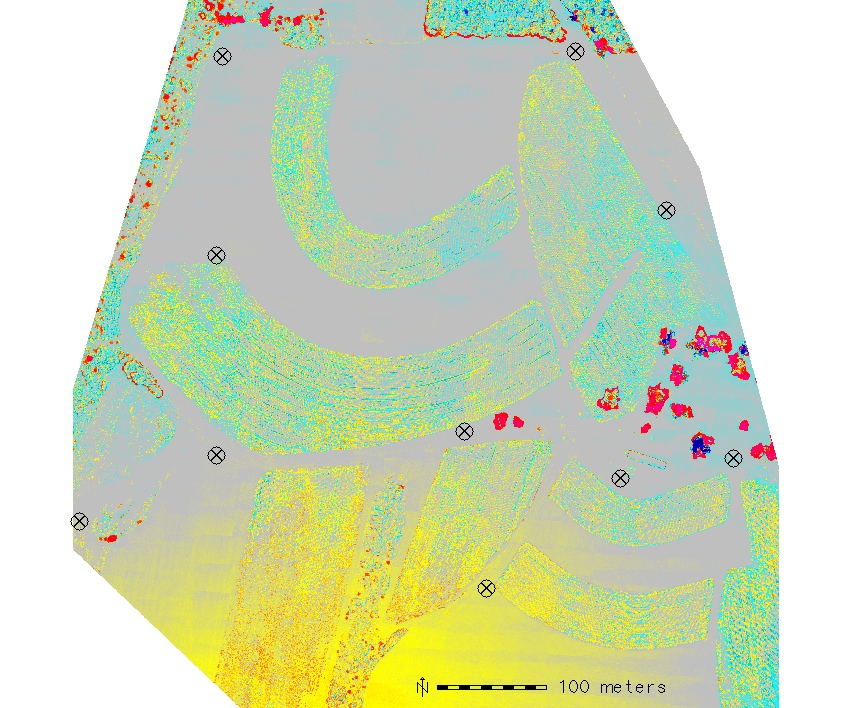
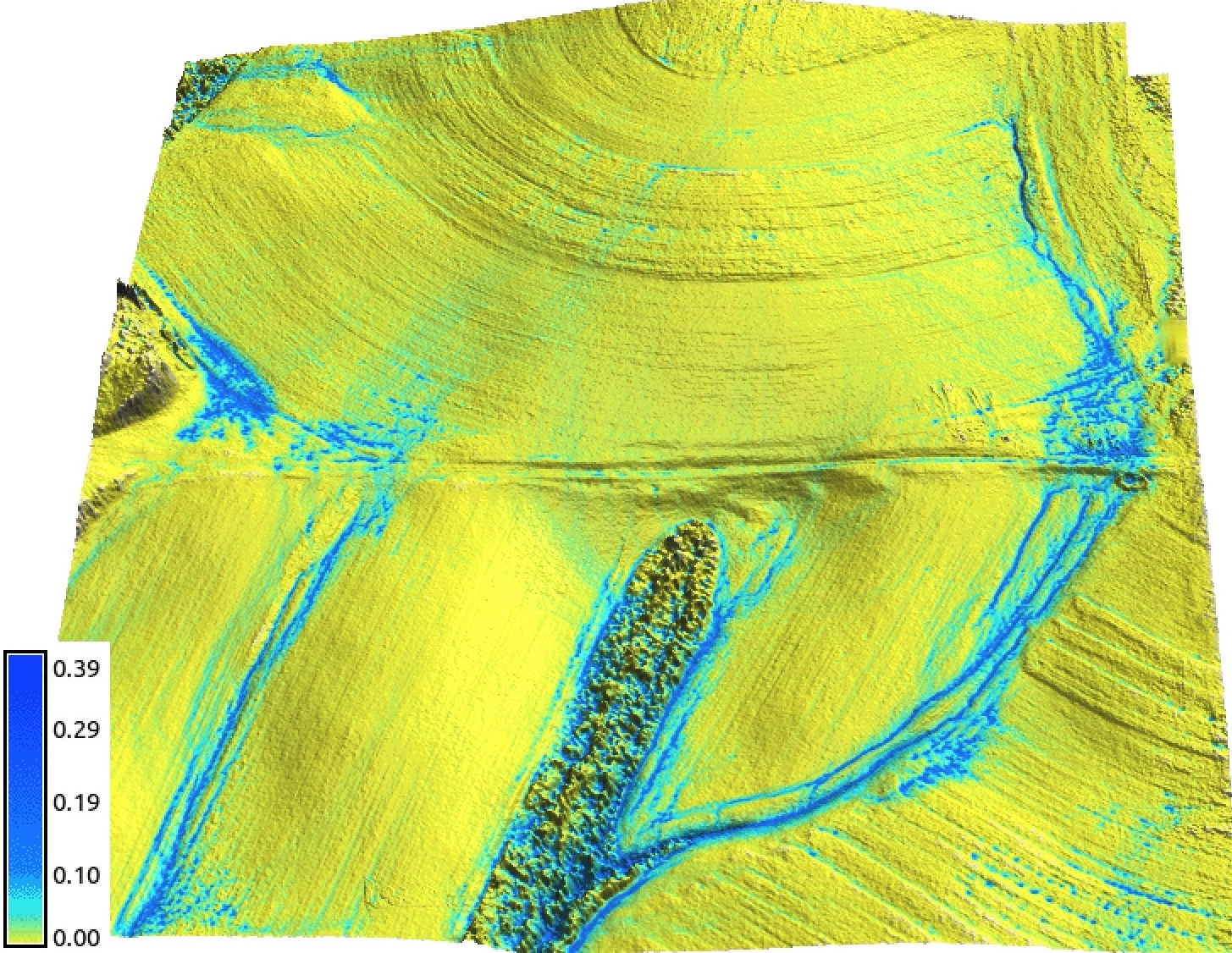
Sensitivity to sUAS DSM artifacts
Shifts between swaths on Trimble processed DSM (without GCPs?) leads to artificial flow pattern
left: difference between trimble and agisoft processed DSM without GCPs - demo flight
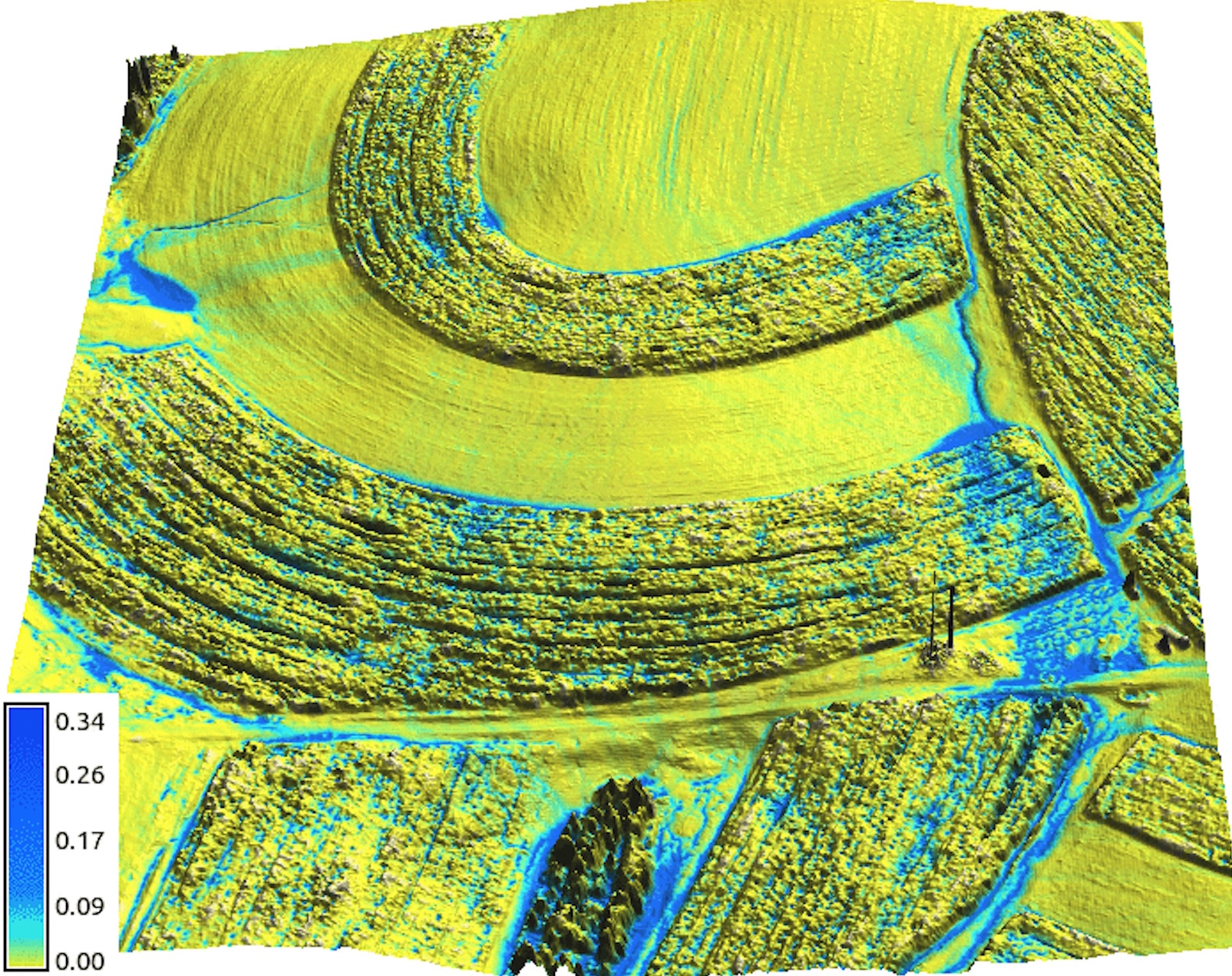
Simulated water depth on sUAS DSM
Simulated surface water depth captures flow redirection by tillage and a small gully

Change in flow pattern based on sUAS data
GRASS GIS flow simulation for January and June 2015
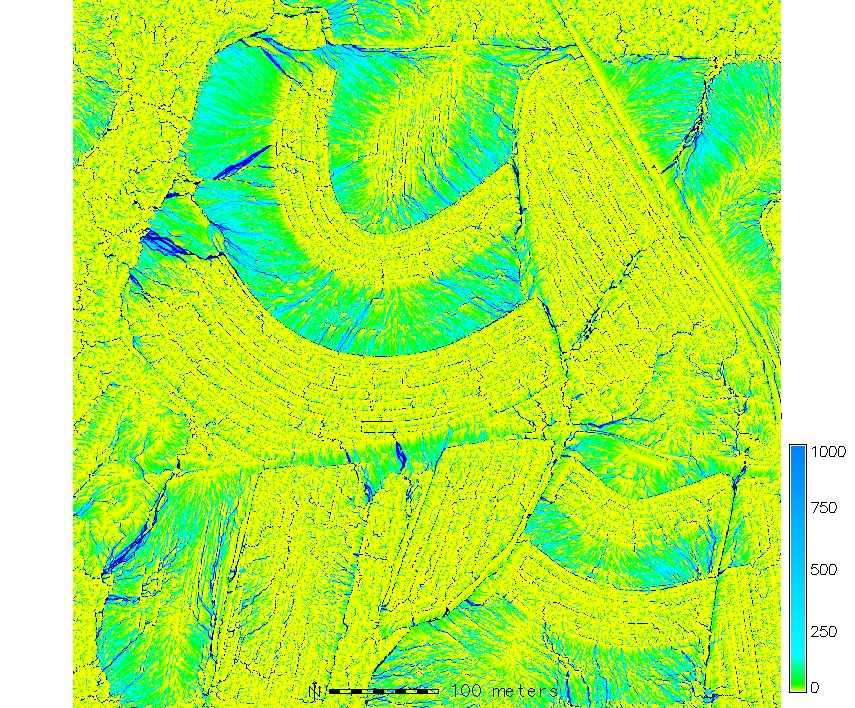
Evolving overland flow based on sUAS data
June DSM (AGISOFT) with flow dynamics as color map
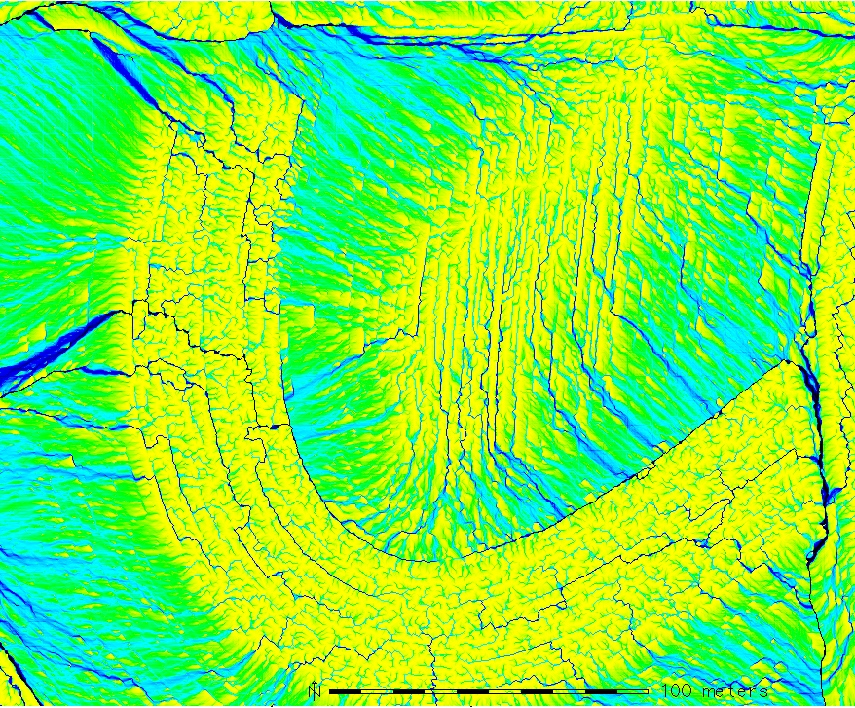
Evolving overland flow based on sUAS data
June DSM (Trimble) with overland flow dynamics as color map
Conclusions
- GCP were crucial for accurate DSM geometry
- High level of detail in DSMs requires robust flowrouting that can handle depressions
- Open source based processing of sUAV data would help to understand the results
- Coordinated effort is needed to develop open source sUAV data processing tools such as Open Drone Map
NCSU OSGeoREL
geospatial.ncsu.edu/osgeorel
- NCSU Open Source Geospatial Research and Education Laboratory
- Member of Geo4all initiative: global network for foss4g education
- NCSU NA leading lab: GRASS GIS development, courses, research projects
- GitHub: https://github.com/ncsu-geoforall-lab