Point cloud data analysis
Center for Geospatial Analytics at North Carolina State University
Justyna Jeziorska, Helena Mitasova & Corey White
Outline
- Characteristics of UAS and lidar-based point cloud data
- Point cloud data processing, visualization, and analysis
- Computing DEM / DSM, and topographic parameters
- Voxel-based analysis and vertical profiles
What are point clouds?
- Dense set of points (x,y,z) defined in 3D space:
- Directly measured using lidar
- Derived from overlapping images using SfM (see previous lectures)
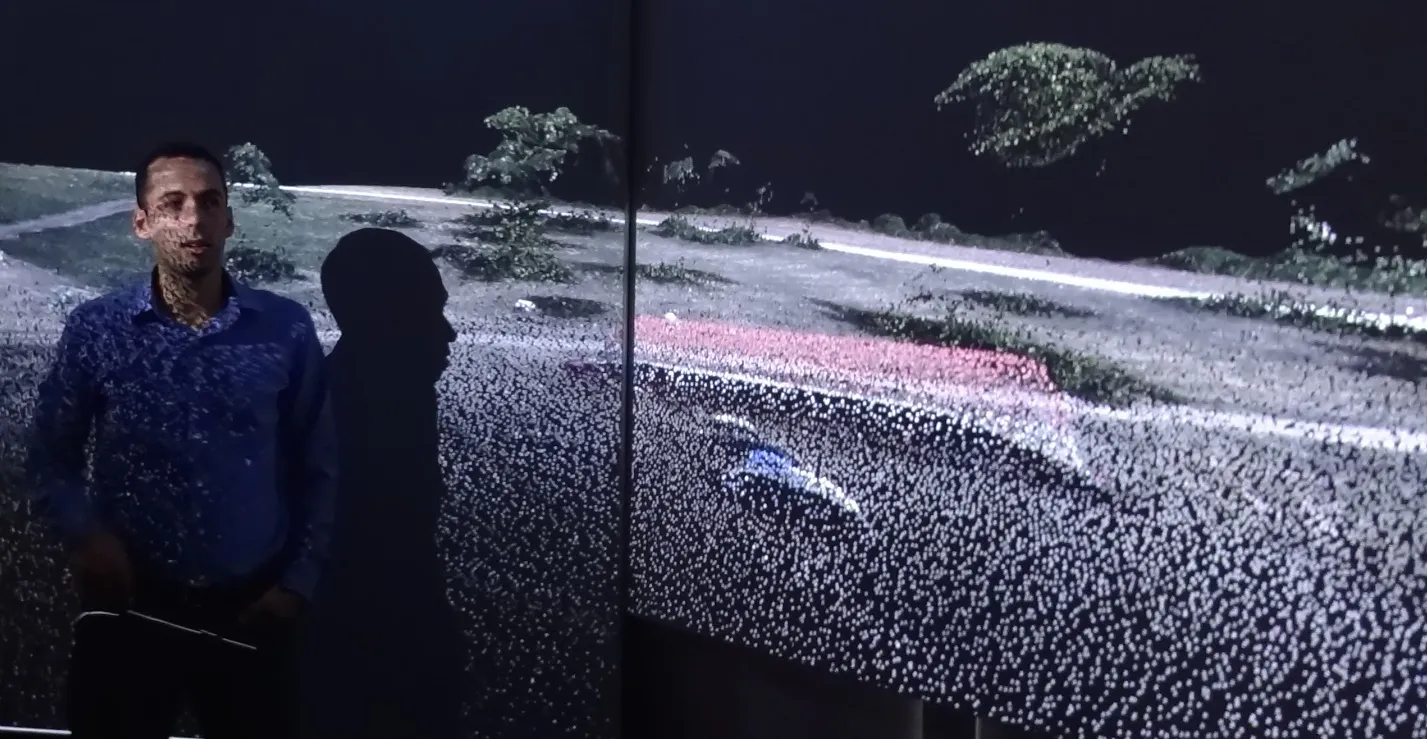
![]()
UAS SfM derived point cloud from Midpines viewed at Hunt library
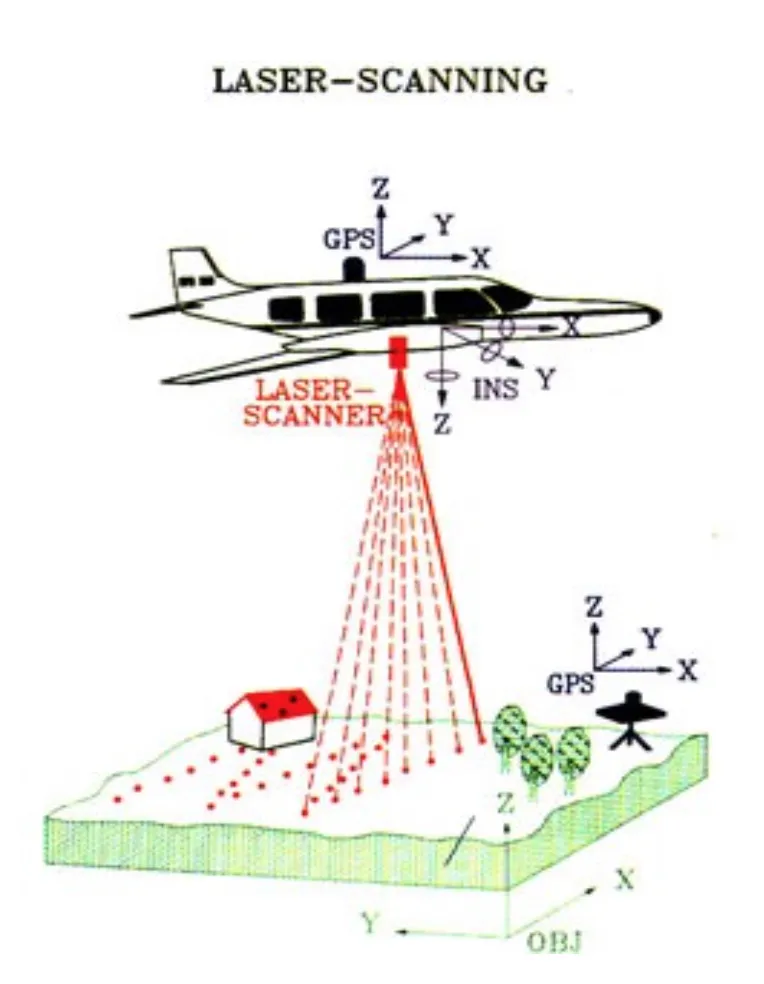
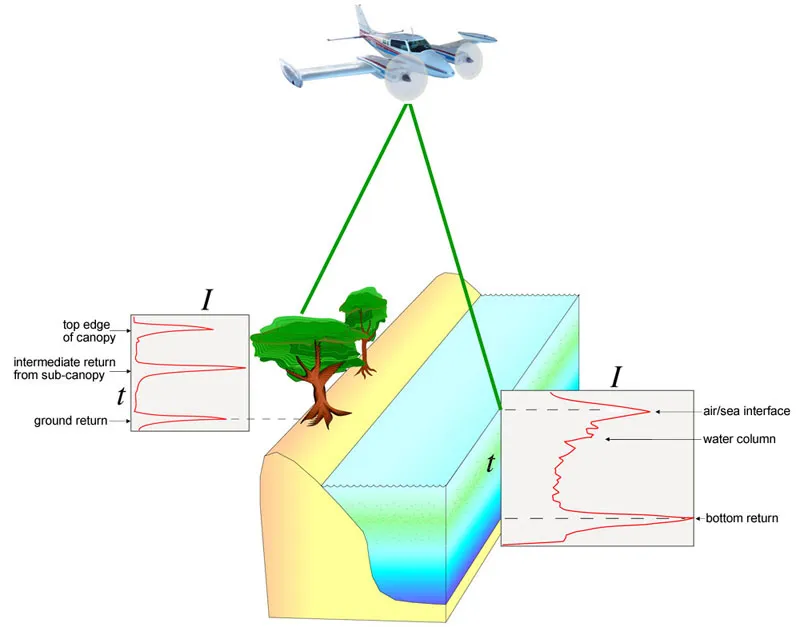
Lidar point cloud acquisition
- Measured time of pulse return is converted to distance
- Georeferencing is based on the position (measured by GPS) and exterior orientation (measured by inertial navigation system INS) of the platform
![]()
![]()
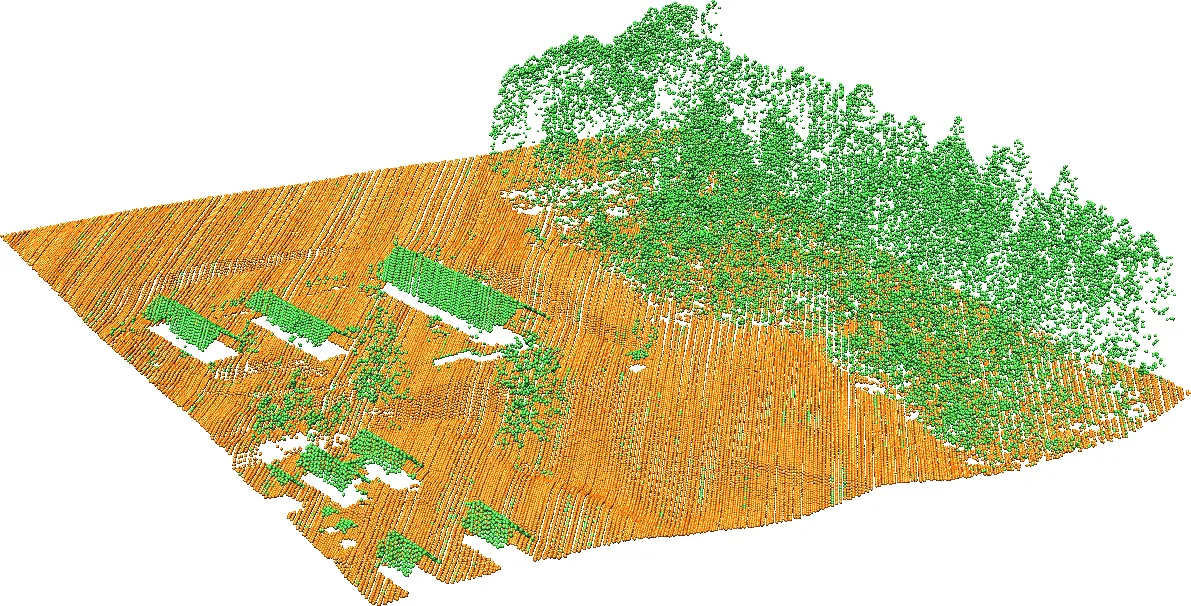
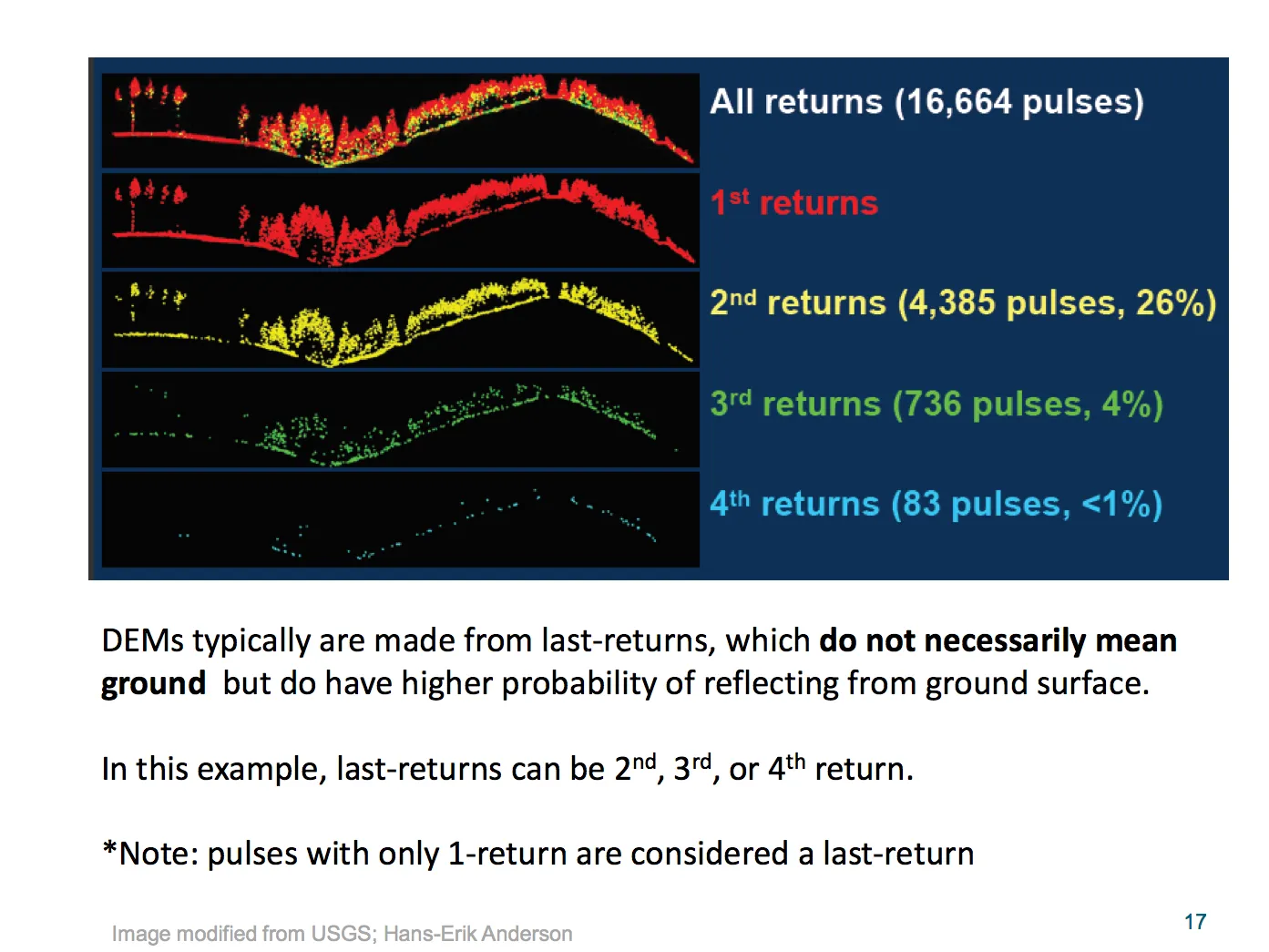
Multiple return lidar point cloud
Lidar pulse can penetrate the tree canopy leading to multiple pulse returns
![]()
yellow: first return, dark brown: second return
Multiple return point cloud profiles
Multiple return point cloud profile view of returns
![]()
Lidar point cloud data
Set of [x, y, z, (r, i, c, …)] measured points reflected from Earth surface or objects on or above it, where:
- [x, y, z] are georeferenced coordinates
- r is the return number
- i is intensity
- c is class
Additional data: R:G:B, scan direction
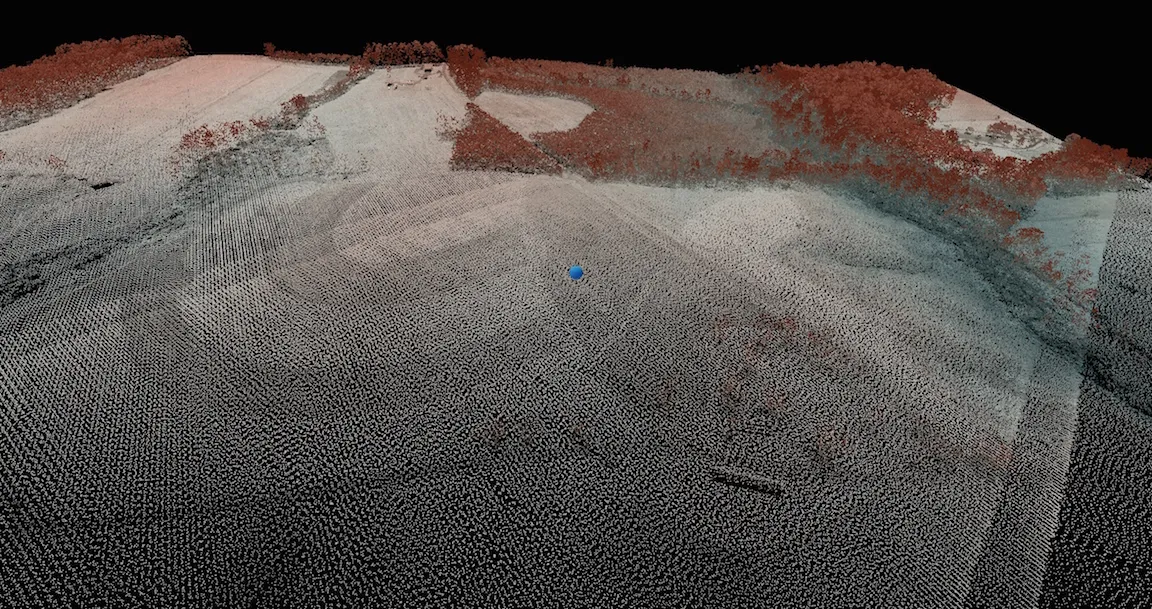
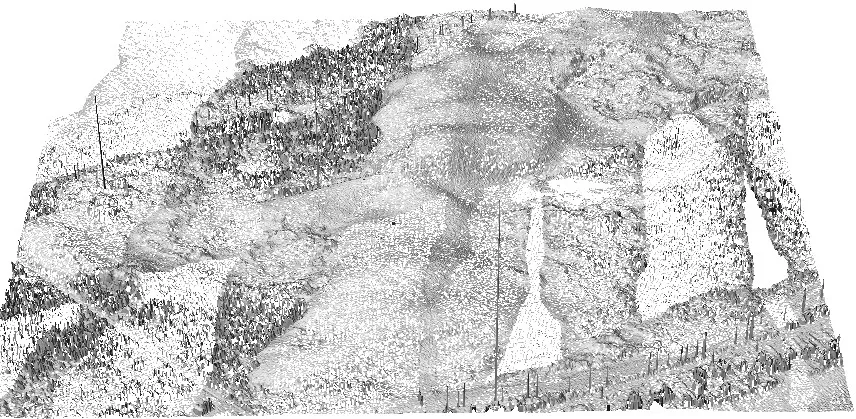
Lidar point cloud preview
![]()
Lidar point cloud preview
- Points distributed throughout canopy
- No points on the wall of the building
![]()
SfM-derived point cloud data
Set of [x, y, z, (R, G, B)] points derived from overlapping imagery using Structure from Motion technique:
- [x, y, z] are georeferenced coordinates
- R, G, B are Red, Green, Blue channels derived from imagery
Additional data depend on sensor
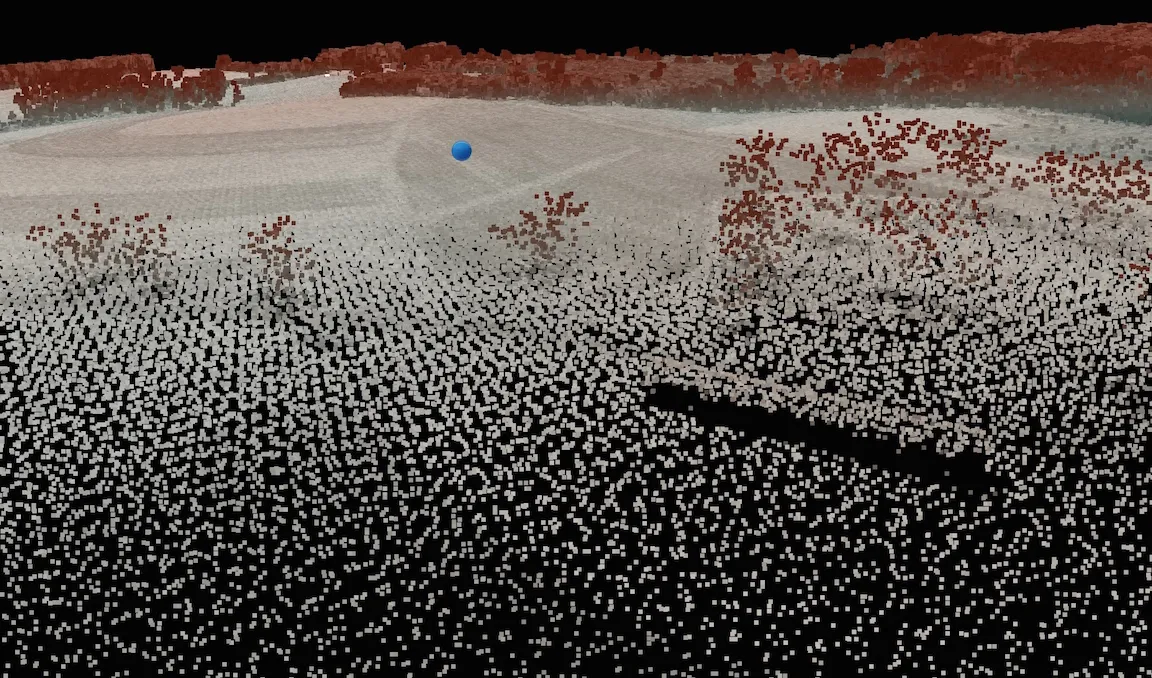
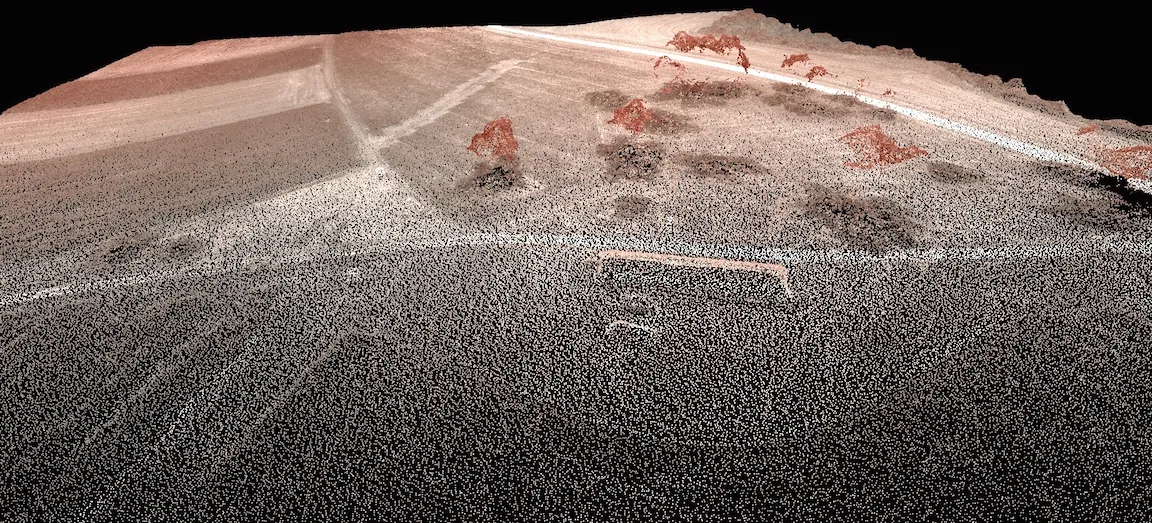
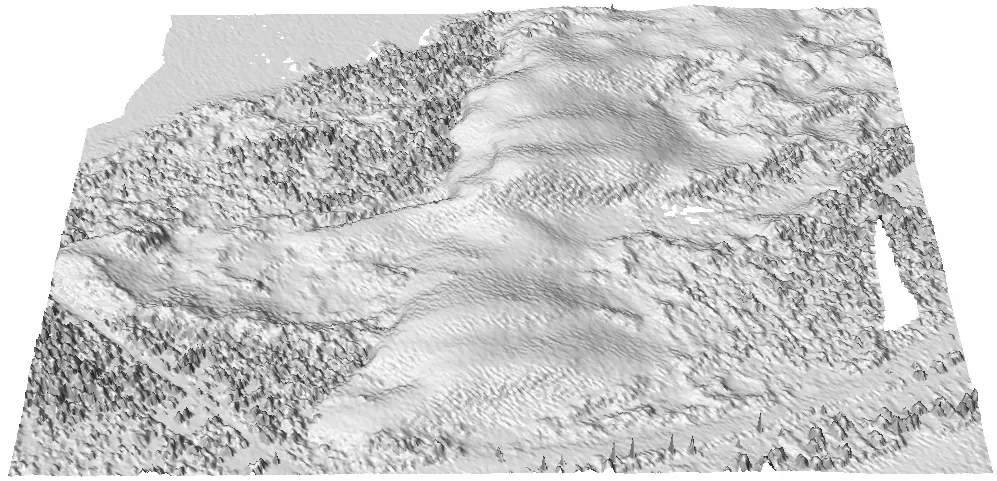
UAS SfM point cloud preview
- Only top of tree canopy captured
- Building densely sampled including the wall
![]()
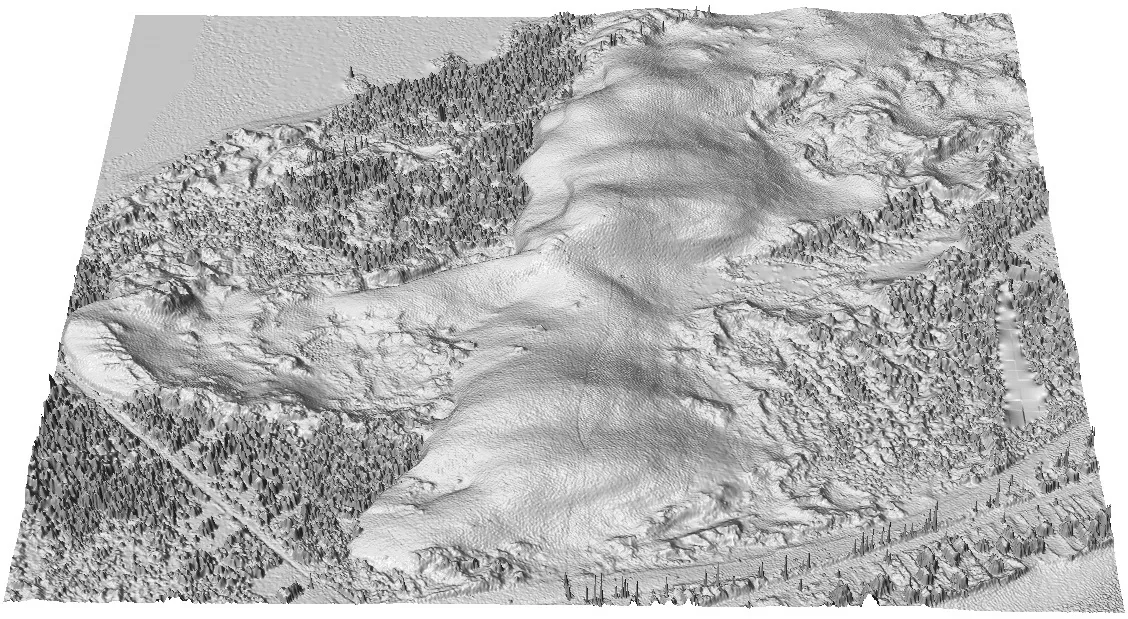
UAS SfM point cloud preview
- Much higher density of points with R:G:B included
![]()
Point cloud data processing
- Preview and analysis of point distribution
- Filtering outliers
- Bare earth point extraction
- Classification: canopy, buildings …
- Decimation (point cloud thinning)
- Transformation to surfaces or 3D objects
Analysis of point distribution
Binning: point statistics for each grid cell at selected resolution
- Number of points per grid cell - map of point densities
- Range, stddv of z-values - map of within cell vertical variability
- Identify data gaps, potential for artifacts
- Use to select appropriate supported resolution for DEM
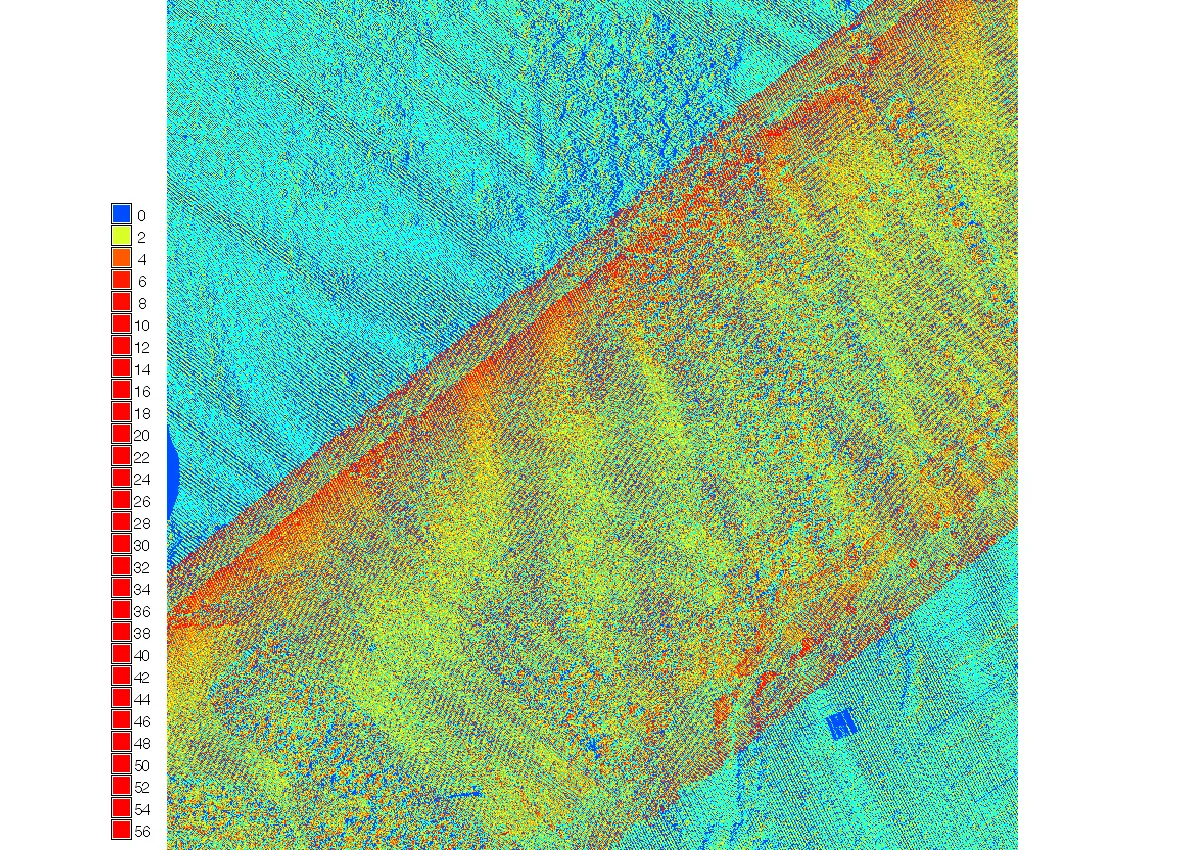
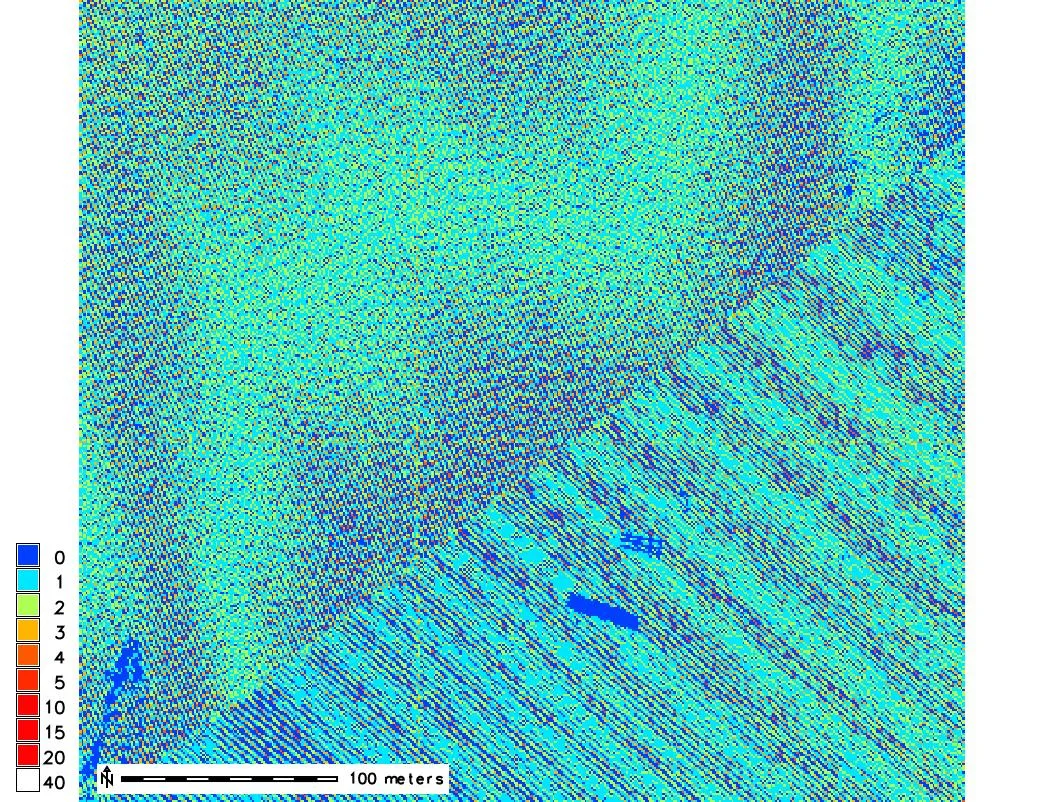
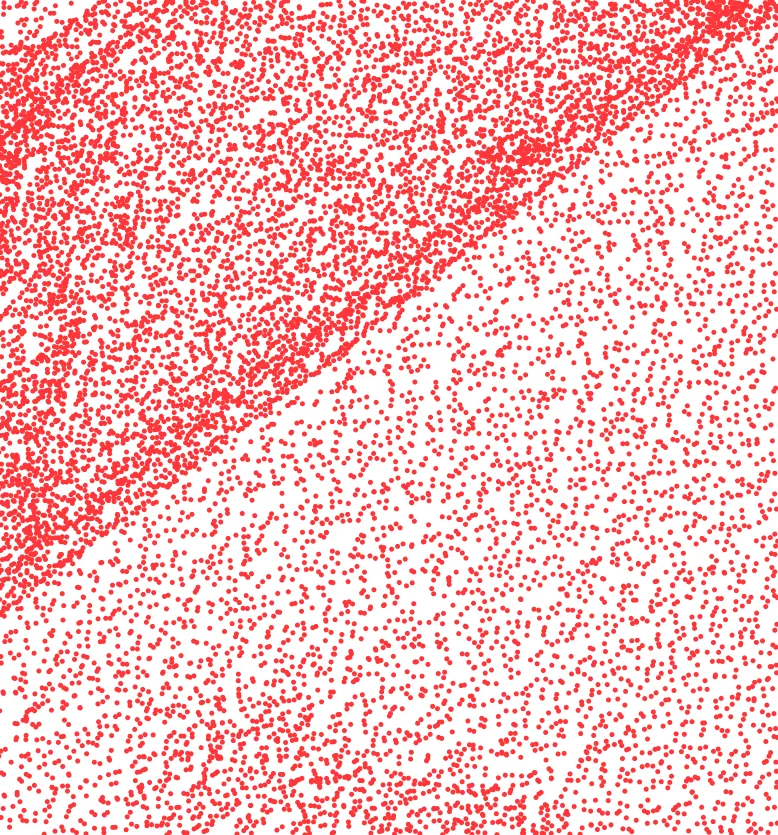
Analysis of point distribution: lidar
Increased densities along swath overlaps or close to terrestrial station position
![]()
![]()
![]()
County-wide 2013 lidar: all returns and bare earth, terrestrial lidar
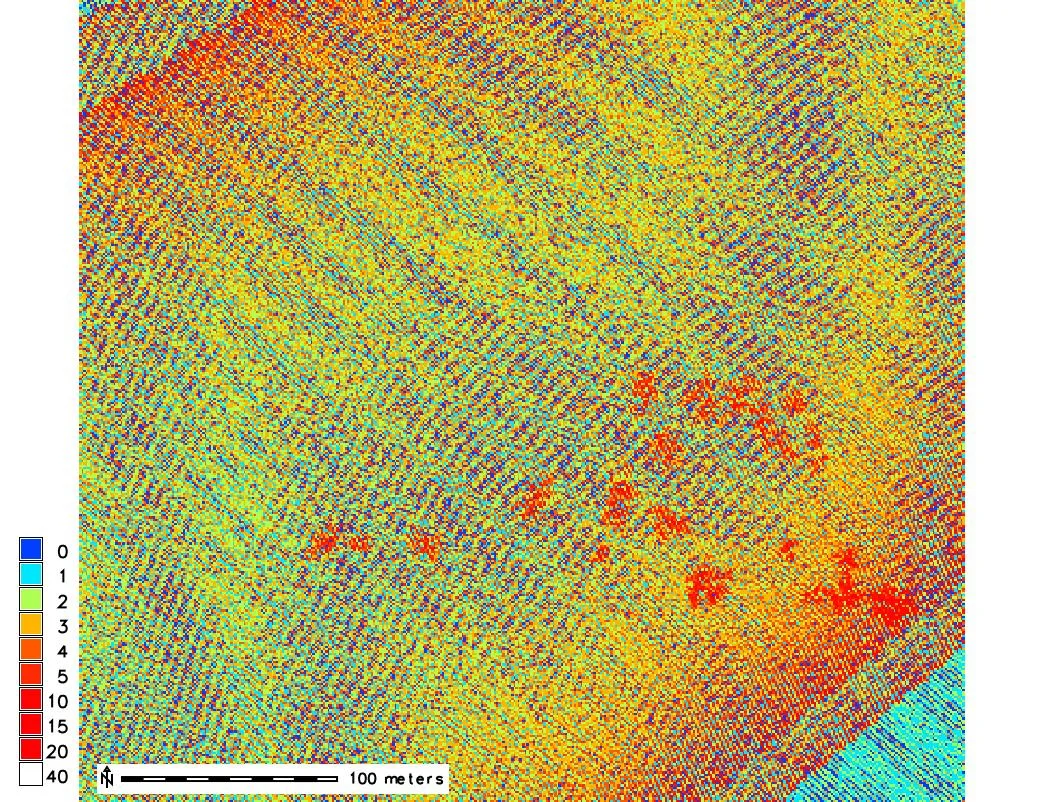
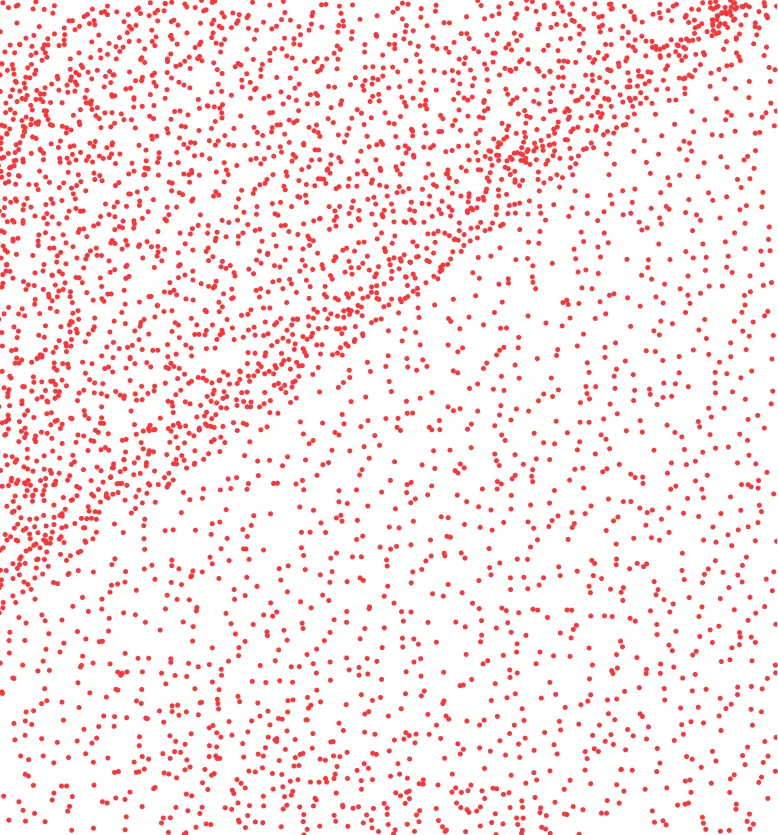
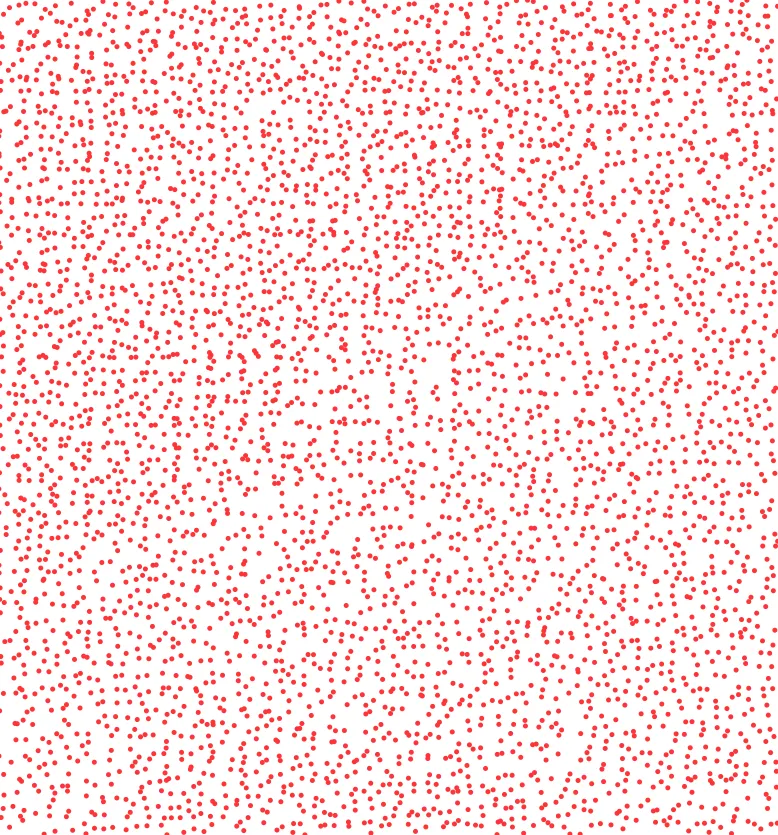
Analysis of point distribution: lidar
Change in pattern along swath overlaps
![]()
![]()
Midpines: number of points per 1m grid cell: for all returns and ground
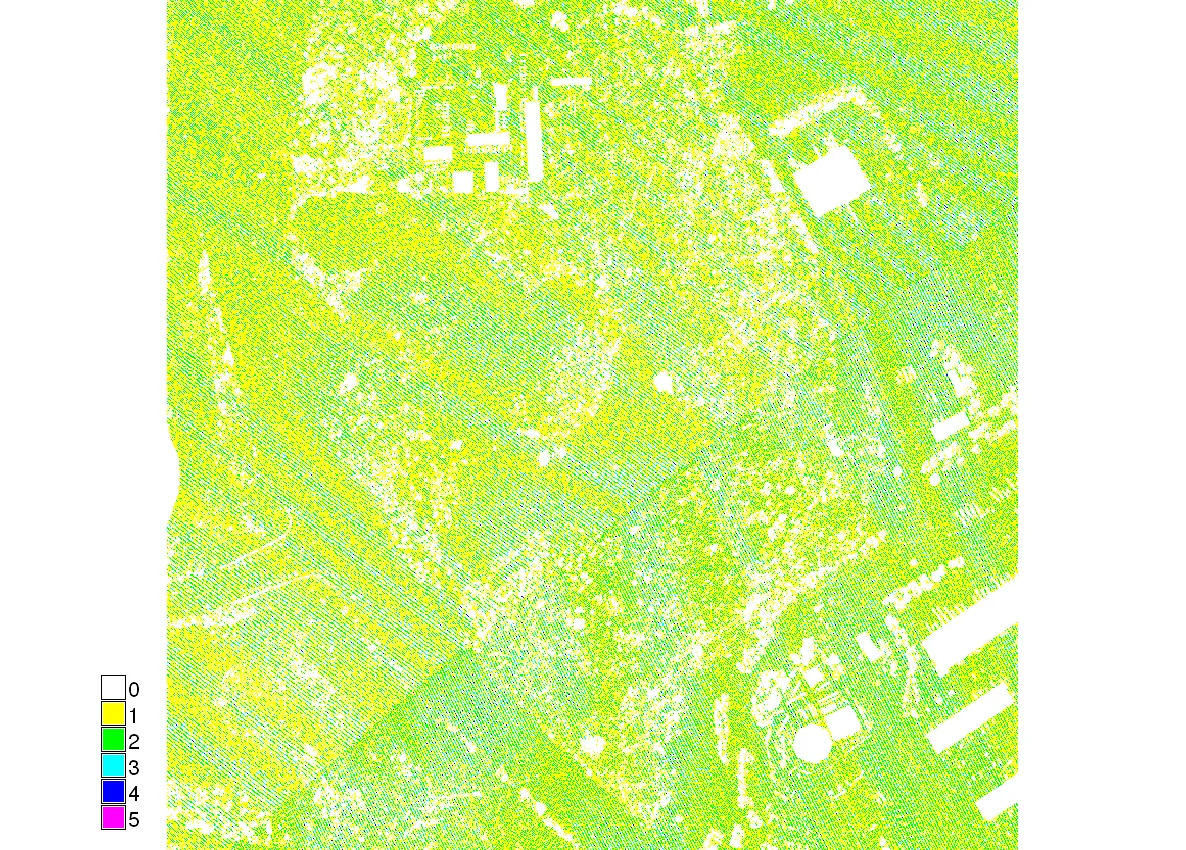
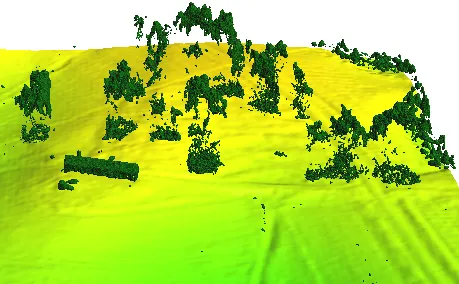
Analysis of point distribution: SfM
High point densities around trees and building edges
![]()
Midpines: number of SfM-derived points per 1m grid cell
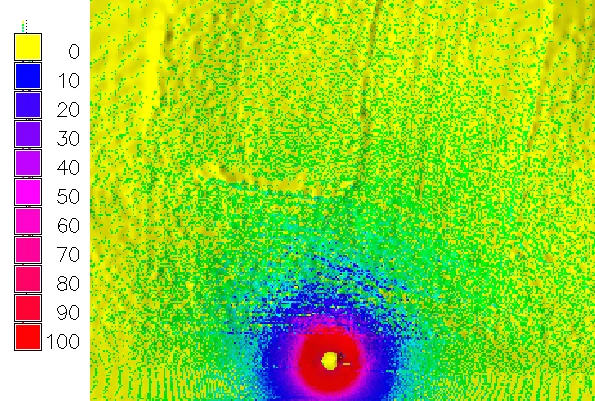
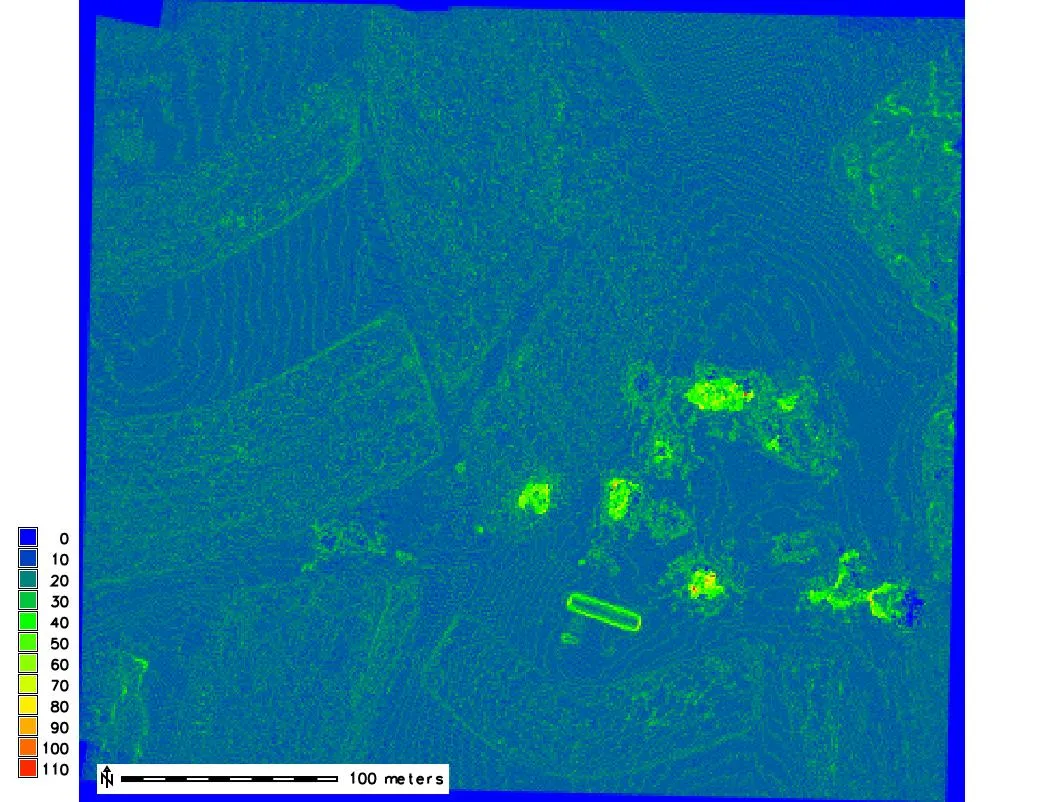
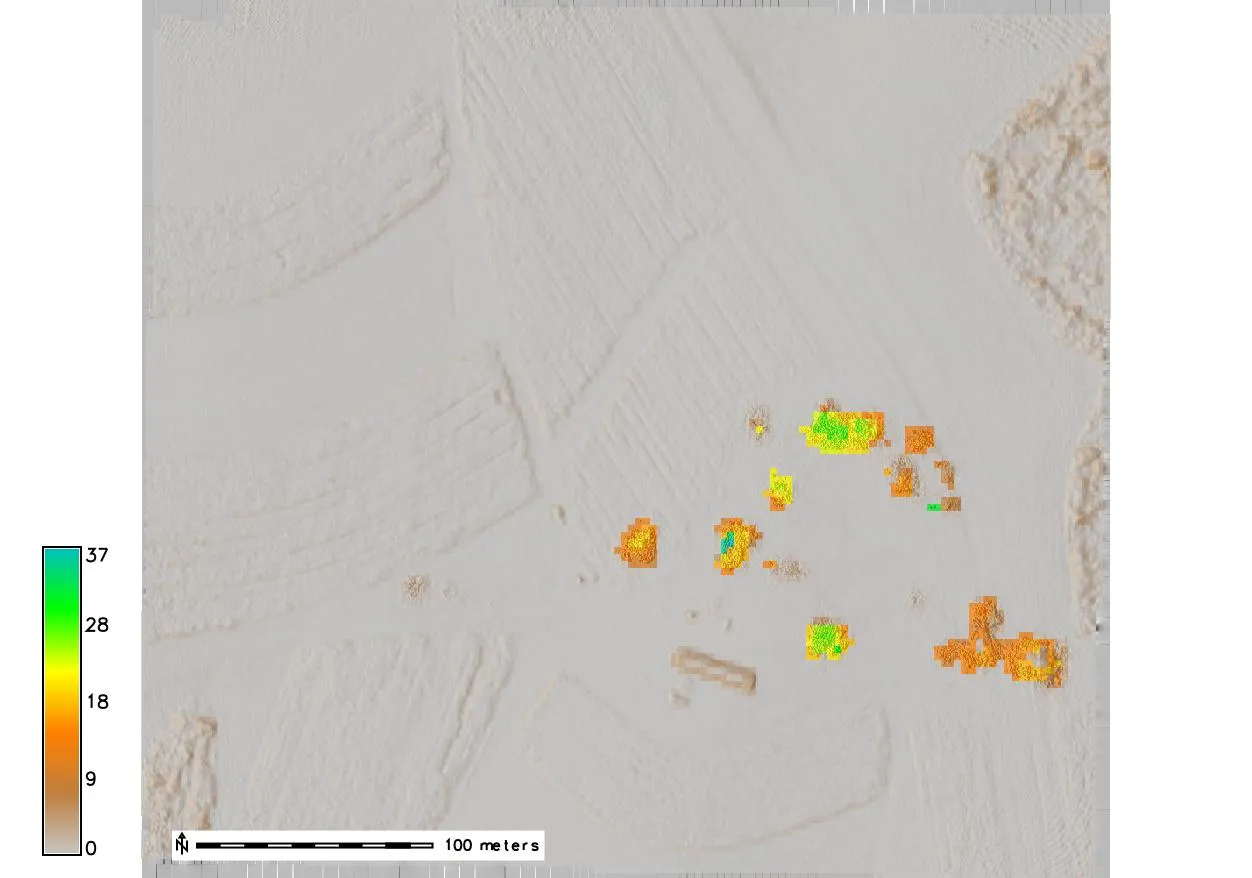
Analysis of within cell z-range
Maps of z-values range within 3m grid cell
![]()
![]()
Midpines z-range lidar and UAS, lidar provides better data about the trees than the denser UAS point cloud
Outliers
- Lidar: birds, particles, material properties
- SfM: errors in point matching
- Filtered by using local z-min, z-max or range thresholds
![]()
Centennial Parkway - outlier present even in processed data
Bare ground and feature extraction
- Multiple returns help but not necessary
- Feature or surface needs to be sampled by sufficient number of points
- Multiscale curvature-based algorithm by Evans and Hudak
- Progressive morphological filter by Zhang
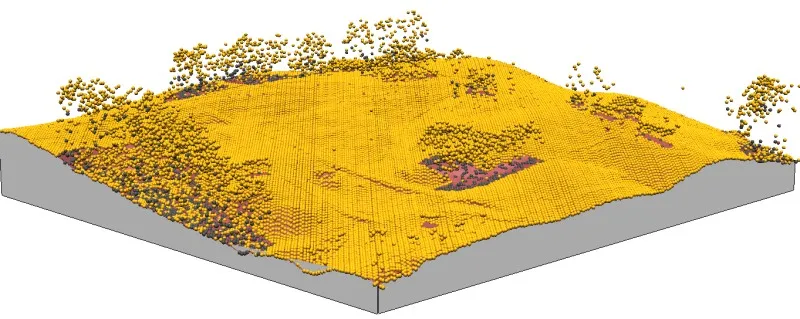
![]()
Midpines: above ground point cloud from lidar by MCC in GRASS
Decimation
- Thinning of point cloud - subsampling
- Reduces the point cloud size - easier to manage data
- Thinning threshold should be based on features that need to be preserved
- Count-based decimation: preserves variations in density
- Grid-based decimation: removes variations in density
- Distance and geometry based decimation: more computationally intensive
Decimation: count-based
![]()
![]()
Preserves relative point densities
Decimation: grid-based
![]()
![]()
Removes variations in point densities
Computing DEM: binning
- Per cell statistics: mean, min, max, or nearest point z-value
- Sufficient for many applications
- No need to import the points, on-fly raster generation
- May be noisy, with no-data areas
Computing DEM: TIN
Meshes are standard in 3D engineering and design systems:
- Variable resolution based on terrain complexity
- Variable level of detail visualization
- 2D triangulation leads to TIN geometry not optimal for 3D, e.g. triangles on roads, artificial dams in valleys
- Harder to combine with other geospatial data
- Limited analytics available
- Harder to share - limited exchange formats
Computing DEM: interpolation to raster
- Supports resolution higher than point density
- Results depend on the method used, but most methods work because of high point densities
- High resolution raster DEMs can be massive - works for most analytics, converts to TIN for 3D visualization
- Easy to share
Jockey’s Ridge lidar 1999
Binning at 1m resolution: many NULL cells
![]()
Jockey’s Ridge lidar 1999
Binning at 3m resolution
![]()
Jockey’s Ridge lidar 1999
Interpolation at 1m resolution
![]()
You can try TIN for comparison - provide data
Midpines UAS SfM
Low density TIN
![]()
Midpines’s UAS SfM
High density TIN
![]()
Midpines’s UAS SfM
Smoothed high density TIN
![]()
Midpines UAS SfM
High density point cloud imported to GRASS GIS and interpolated by spline method
![]()
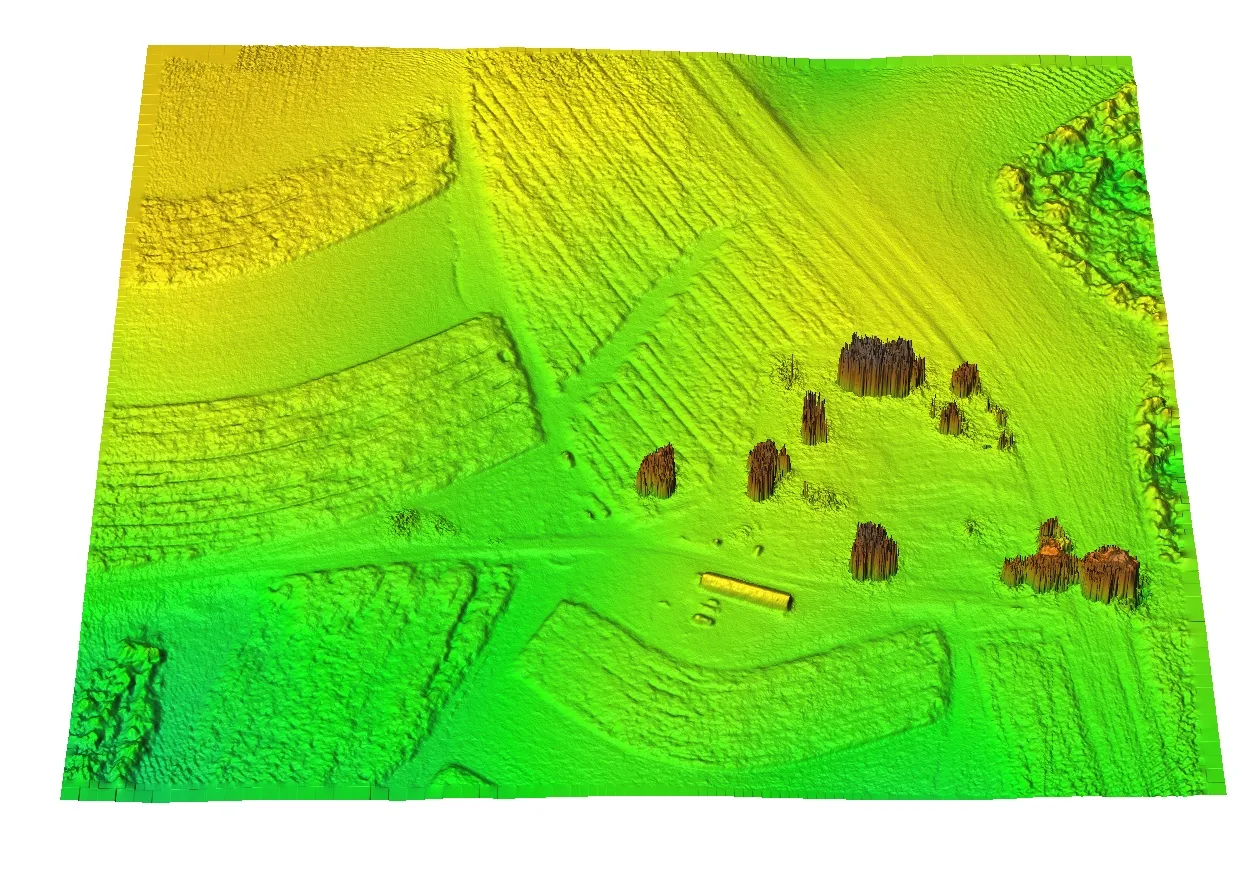
Midpines interpolated DSM
Lidar and UAS SfM based DSM
![]()
![]()
Topographic analysis
Deriving topographic parameters from point cloud based DEMs has challenges:
- DEMs are often noisy and parameters can reflect noise or scan pattern rather than actual topography
- High resolution leads to representation of landforms by 10s or 100s of points or grid cells
- Standard topographic analysis using 3x3 neighborhood leads to noisy patterns of topographic parameters or bias towards point distribution pattern
Topographic analysis using splines
Simultaneous computation of parameters with interpolation
- Parameters derived from original points rather than raster
- Explicit equations for partial derivatives: RST
- Tens or hundreds of points can be used
- Tuning the level of detail by tension and smoothing parameters
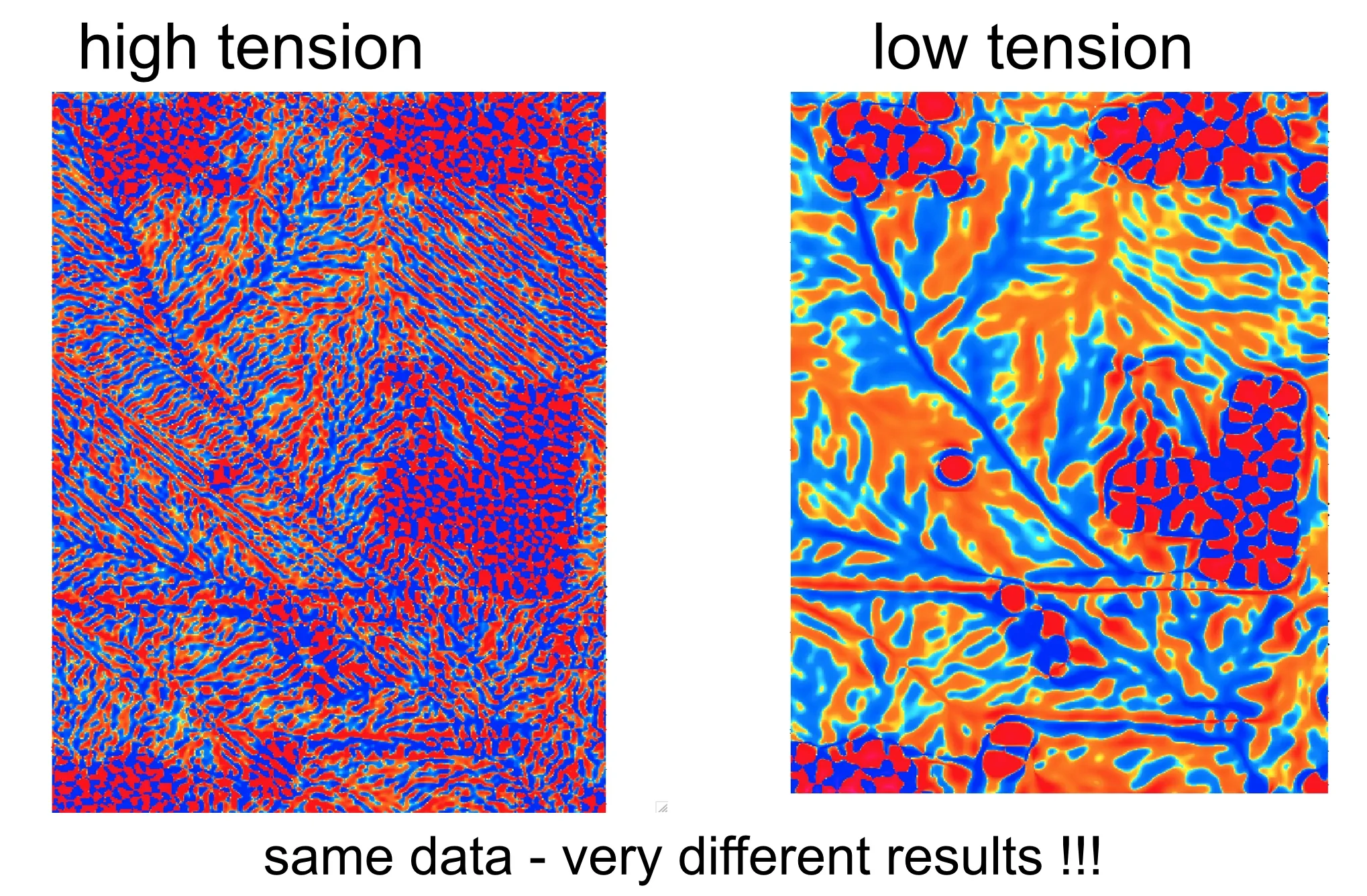
Topographic analysis using splines
Tuning the level of detail with tension parameter
![]()
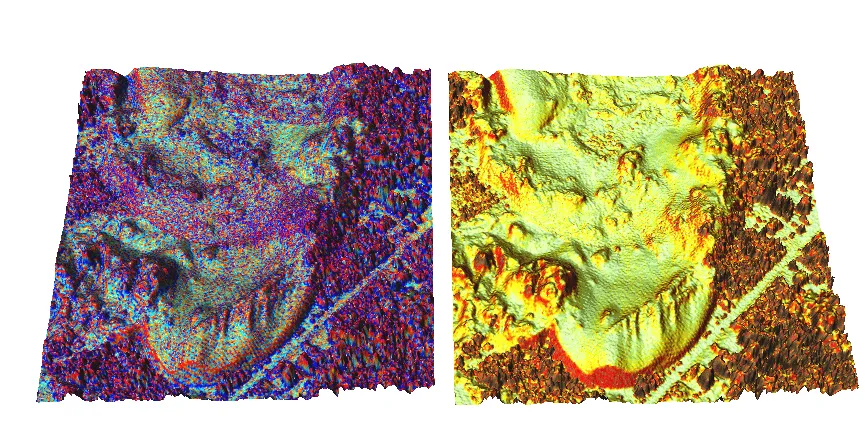
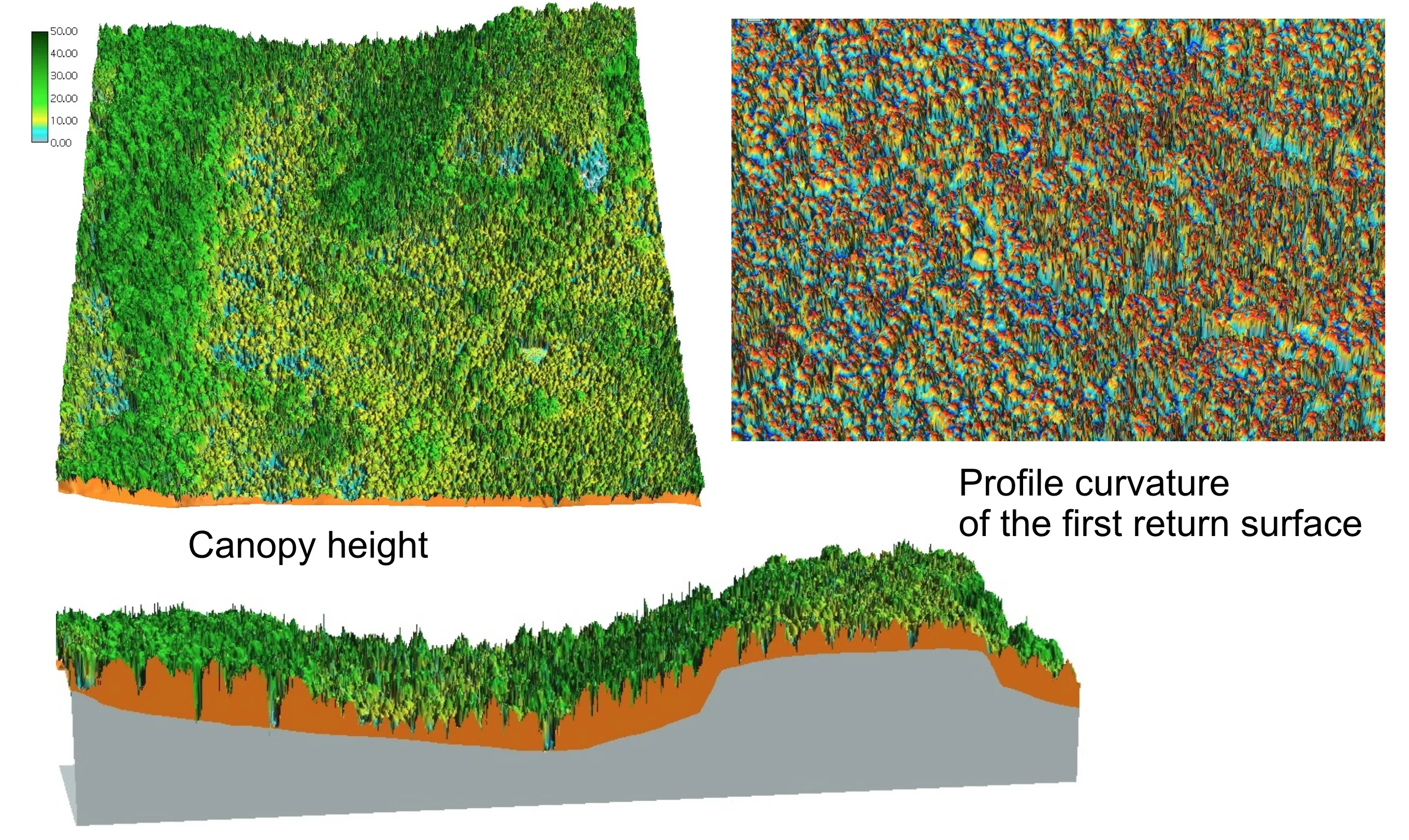
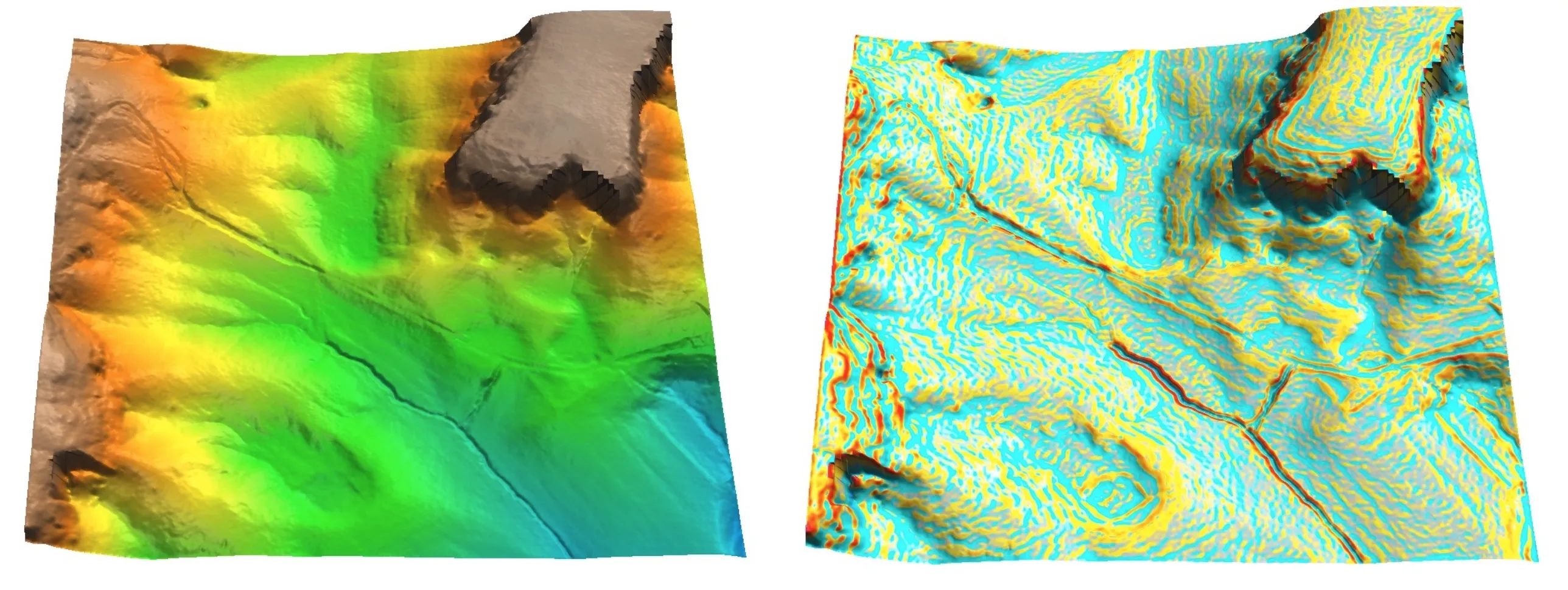
Topographic analysis using splines
Tuning the level of detail with tension parameter
![]()
Profile curvature and slope maps draped over 1m res. DEM
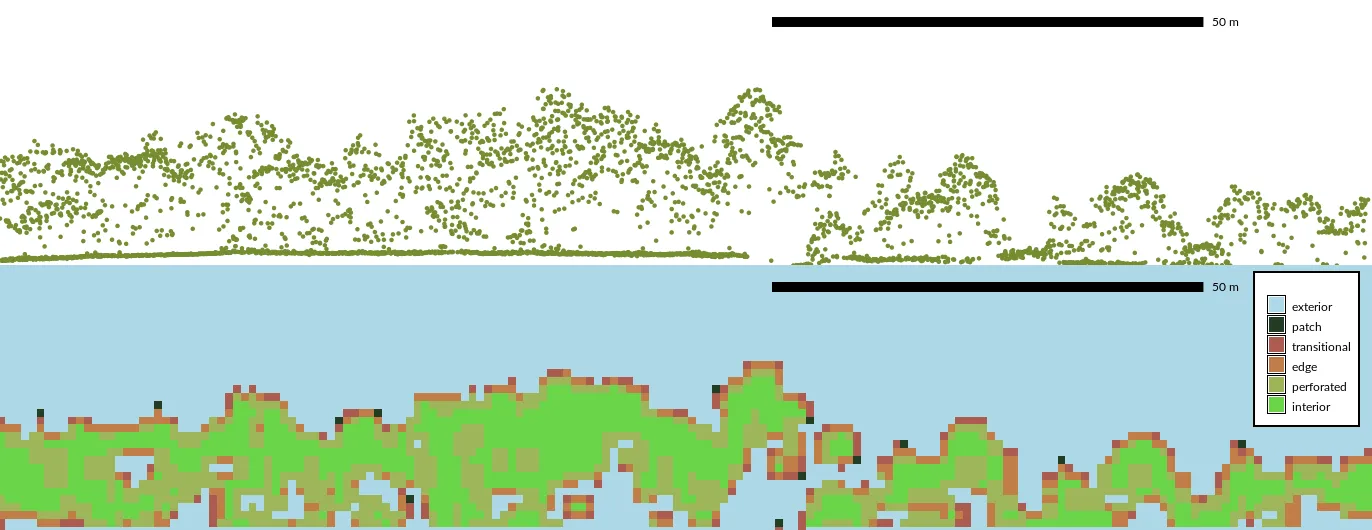
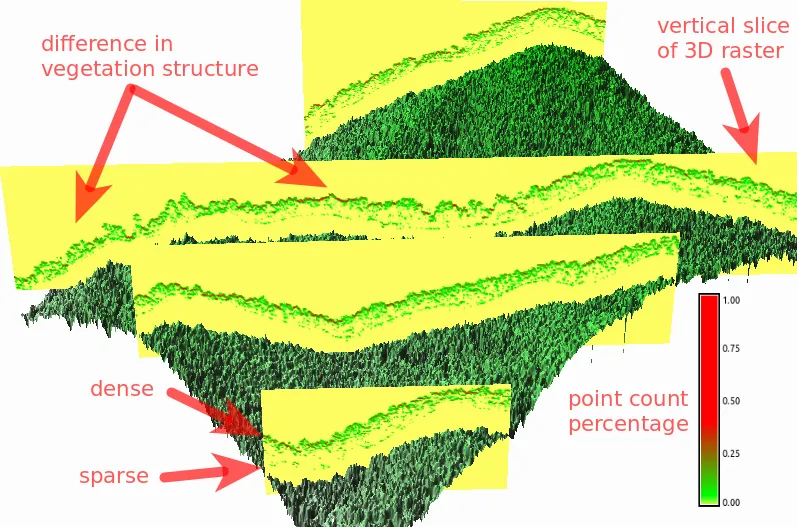
Vertical point cloud analysis
Voxel-based point analysis and 3D fragmentation index
![]()
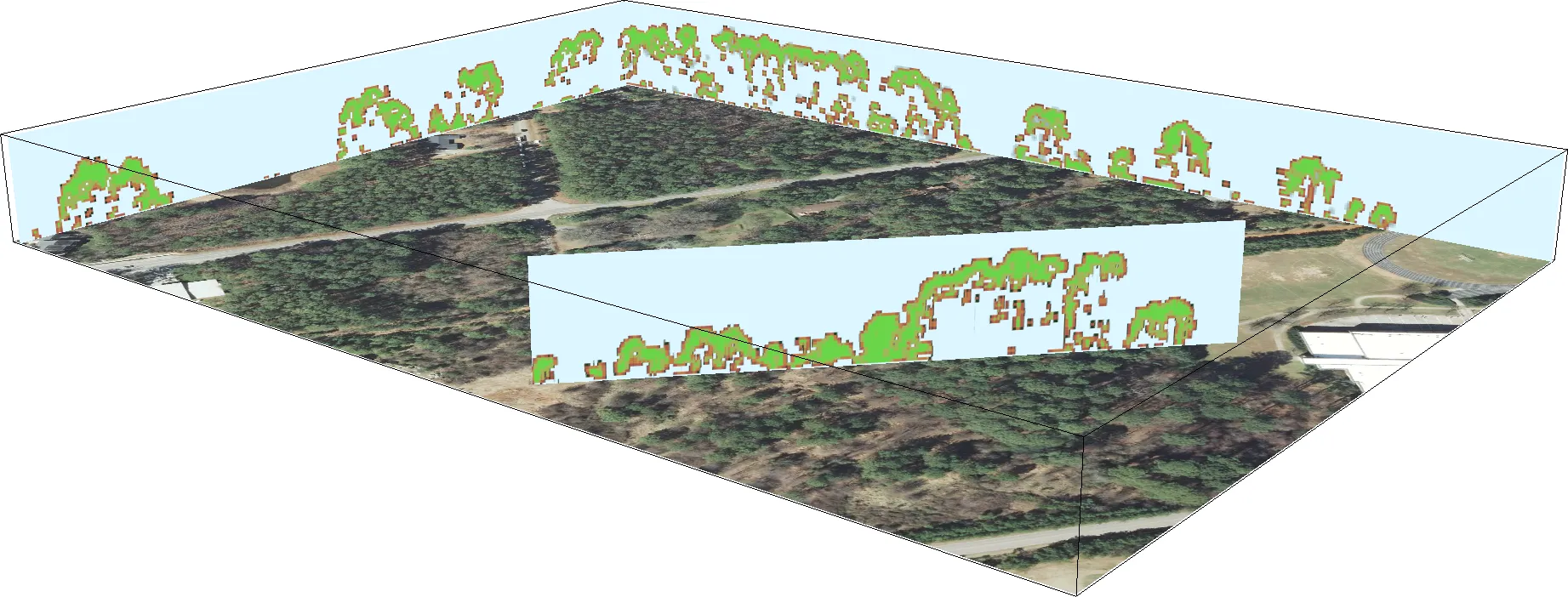
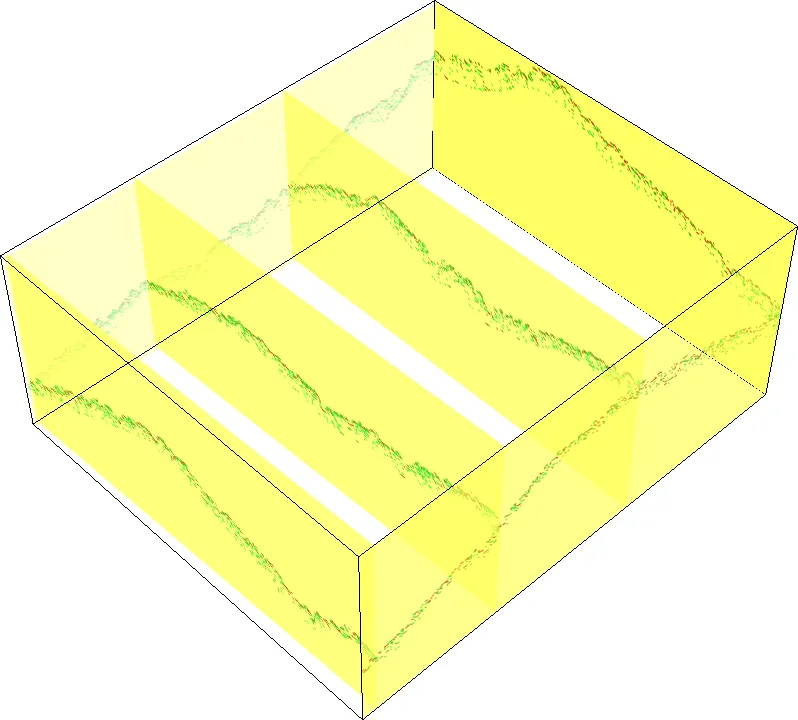
Vertical point cloud analysis
3D visualization of vertical fragmentation index cross-sections
![]()
Mamoth Cave Park: data
- Classified point cloud in las format
- Raw full waveform in lwv format
- Imagery
![]()
Mamoth Cave Park: canopy
![]()
Mamoth Cave Park: bare earth
![]()
Voxel models
![]()
![]()
- Petras, V; Petrasova, A; Jeziorska, J; Mitasova, H, 2016, Processing UAV and lidar point clouds in GRASS GIS, ISPRS Archives.
Advances in lidar data acquisition
- Waveform, single photon and multispectral lidar
- Velodyne (lidar array - small and light)
- Lidar is available for large UAS and helicopters, new small systems are still being tested for accuracy
Lidar data sources
Public data sources (see the links here):
- National map elevation data - used to be CLICK: raw point clouds usually in LAS format
- NOAA Digital Coast: coastal point clouds with on-fly binning
- NC Floodplain Mapping: bare Earth: points, 20ft DEM and 50ft DEM with carved channels
- NC data portal QL2 lidar and derived products
- OpenTopography: NCALM data
More about lidar in GRASS at https://grasswiki.osgeo.org/wiki/LIDAR