flowchart LR calibrate["`Apply **sensor calibration** and **reflectance panels**`"] calibrate --> adjust["`Adjust for illumination differences (sun angle, clouds)`"] adjust --> correct["`Correct vignetting and shadow effects`"]
UAS Change Detection Methods
GIS 584: UAS Mapping & Analysis
Corey White
Overview
Detecting and quantifying changes using multi-temporal UAS data
Focus areas
- Pre-classification methods
- Feature and object-based methods
- Post-classification change detection
- Data co-registration and uncertainty
Why Change Detection?
- Assess temporal dynamics of landscapes and features
- Monitor environmental and human processes:
- Erosion, deposition, landslides
- Vegetation growth and stress
- Infrastructure development and construction monitoring
- Disaster impact and recovery (floods, hurricanes, fires)
UAS Advantages
- High spatial and temporal resolution compared to satellites
- Flexible deployment for localized studies
- Affordable repeat coverage for time series
- Capability to integrate RGB, multispectral, and LiDAR payloads
Data Pre-Processing
- Radiometric Correction
- Geometric Correction & Co-registration
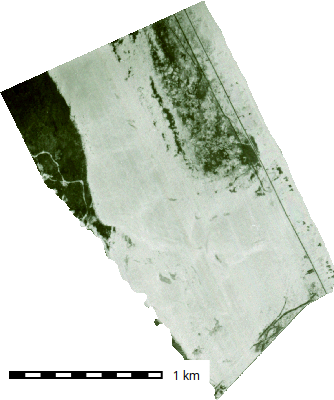
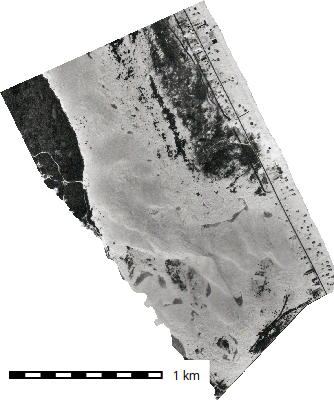
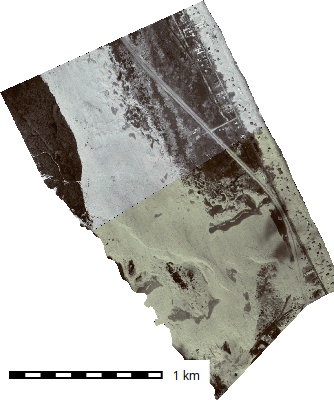
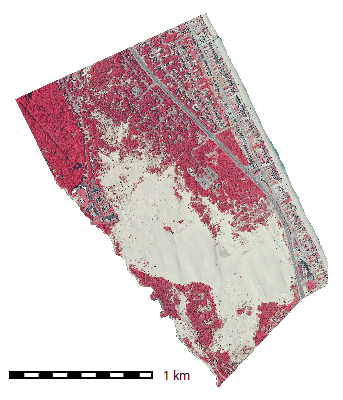
Jockey’s Ridge
1932 - 2009




Radiometric Correction
Normalizes brightness and spectral values across flights
Key steps:
Enables meaningful spectral differencing and vegetation indices
Addidional Resources (Sampath et al. (2023))
Geometric Correction & Co-registration
Ensures all datasets share the same coordinate reference and alignment
Methods
Geometric Correction & Co-registration
Evaluate accuracy using
- RMSE (root mean square error)
- NMAD (normalized median absolute deviation)
- reprojection error
Co-registration in Practice
- Orthomosaic alignment via tie-points and transformation models
- DEM alignment: remove vertical bias and tilt
Common issues:
- Local warping, temporal parallax, surface deformation
- GCP mismatch or insufficient tie points
Best practices:
- Use stable surfaces (buildings, pavement) for control points
- Validate with visual overlays and difference histograms
- Compute NCC or correlation metrics for quality assurance
Pre-Classification Change Detection
Image Differencing & Rationing
- Simple and widely used for radiometrically stable imagery
- Compute differences between bands, indices, or reflectance values:
- ( B = B_{t2} - B_{t1} )
- Apply thresholds:
- Manual (visual inspection)
- Automatic (Otsu’s method, ±1σ) (Sha et al. 2016)
- Interpretation:
- Positive → increase in brightness or greenness
- Negative → decrease (e.g., vegetation loss)
Pre-Classification Change Detection
- Spectral Index Differencing
- DEM of Difference (DoD)
- Multi-Temporal Image Fusion
Spectral Index Differencing
- NDVI, VARI, NDRE, NDMI commonly used
- Highlights vegetation or moisture change
- Formula example: \[\Delta NDVI = NDVI_{t2} - NDVI_{t1}\]
- Thresholds often set at ±0.1–0.2
- Applications: crop stress detection, vegetation removal, regrowth analysis
DEM of Difference (DoD)
- Calculates elevation change: \[DoD = DEM_{t2} - DEM_{t1}\]
- Quantifies erosion, deposition, or volumetric change
- Requires vertical co-registration and uncertainty estimation
- Error propagation: \[\sigma_{comb} = \sqrt{\sigma_{1}^2 + \sigma_{2}^2}\]
- Minimum Level of Detection (LoD95) defines confidence threshold
Multi-Temporal Image Fusion
- Principal Component Analysis (PCA) detects correlated multi-band change
- Change Vector Analysis (CVA) measures magnitude and direction of spectral change
Common issues:
- Sensitive to subtle multi-band variations
- Useful for multi-sensor integration (e.g., RGB + multispectral)
Feature-Based & Object-Based Change Detection (OBIA)
Feature-Based
- Segmentation & Object Generation
- Feature Extraction
Object-Based Change Detection (OBIA)
- Object Comparison
Feature-Based
Segmentation & Object Generation
Divide imagery into homogeneous regions
Techniques:
- region-growing
- edge-detection
- watershed
- multi-resolution segmentation
- Scale parameter controls object granularity
Feature Extraction
Derive attributes per object:
- mean NDVI,
- texture
- shape
- context
Object-Based Change Detection (OBIA)
Object Comparison
Compare across dates by
- overlap
- centroid shift
- attribute change
Enables context-aware change analysis
Feature-Based & Object-Based Change Detection (OBIA)
Advantages
- Reduces pixel noise
- Captures spatial context
- Integrates spectral + geometric information
Limitations
- Segmentation parameter sensitivity
- High computational cost
- Object definition inconsistencies
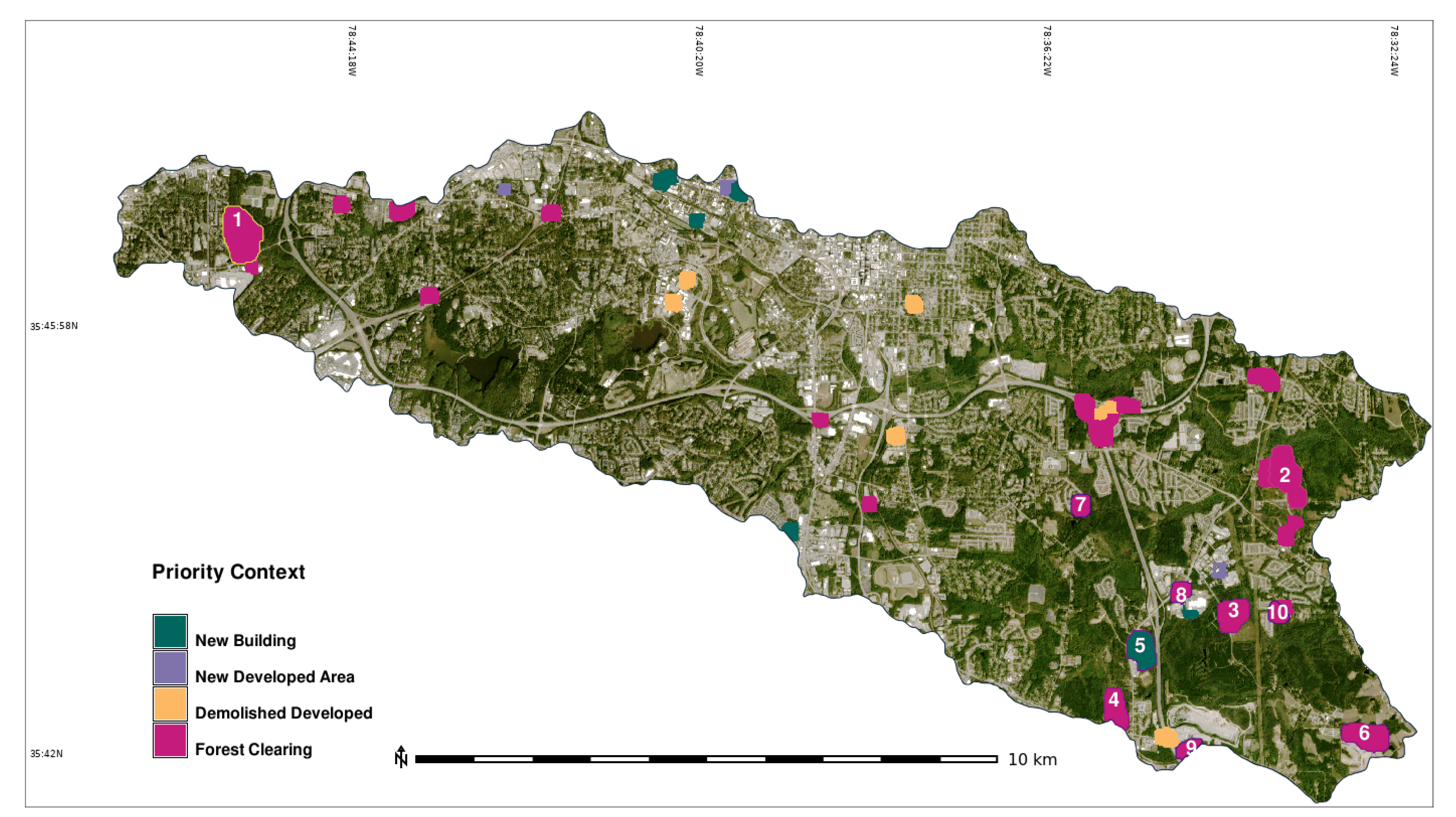
Post-Classification Change Detection
- Classify each epoch separately, then compare thematic results
- Produces categorical transitions (e.g., Vegetation → Bare Soil)
- Sensitive to classification consistency
Workflow
- Classify imagery for each date (RF, SVM, DL models)
- Align class maps
- Cross-tabulate transitions
- Derive change maps and summary statistics
Example Cross-Classification Matrix
| Class (t1→t2) | Vegetation | Bare Soil | Built-up |
|---|---|---|---|
| Vegetation | 80% | 15% | 5% |
| Bare Soil | 10% | 85% | 5% |
| Built-up | 5% | 5% | 90% |
- Off-diagonal values = change areas
- Summarize transitions and map visually
Accuracy and Error Propagation
- Misclassification at each date compounds
- Evaluate using error matrices and Kappa coefficients
- Apply conditional probability or Bayesian correction methods
Advanced Approaches
- Deep Learning (U-Net, CNN) for semantic segmentation
- Temporal fusion networks capture time-based patterns
- Ensemble methods improve stability (RF + GBM)
- Integration with LiDAR or radar for 3D + spectral change detection
Uncertainty and Validation
Sources of Uncertainty
- Geometric misalignment
- Radiometric inconsistencies
- Shadowing and occlusion
- Temporal aliasing (changes between acquisition dates)
Quantifying Confidence
- Use control points and stable areas
- Propagate DEM and reflectance errors
- Define LoD95 or 3σ thresholds for reporting change
Case Studies & Applications
Geomorphic Change
- Riverbank erosion mapping using DoD
- Landslide volume estimation
- Coastal dune dynamics
Vegetation Monitoring
- Crop regrowth and stress detection
- Post-fire recovery mapping
- Invasive species monitoring
Infrastructure & Disaster Response
- Construction progress mapping
- Post-flood damage assessment
- Landslide and debris flow detection
Summary
Key Takeaways
- Co-registration accuracy is the foundation of reliable change detection
- Select method based on:
- Data type (spectral, elevation, categorical)
- Temporal frequency
- Change magnitude
- Address uncertainty at every stage
Looking Ahead
- Real-time change detection pipelines (Edge + Cloud)
- AI-assisted feature tracking
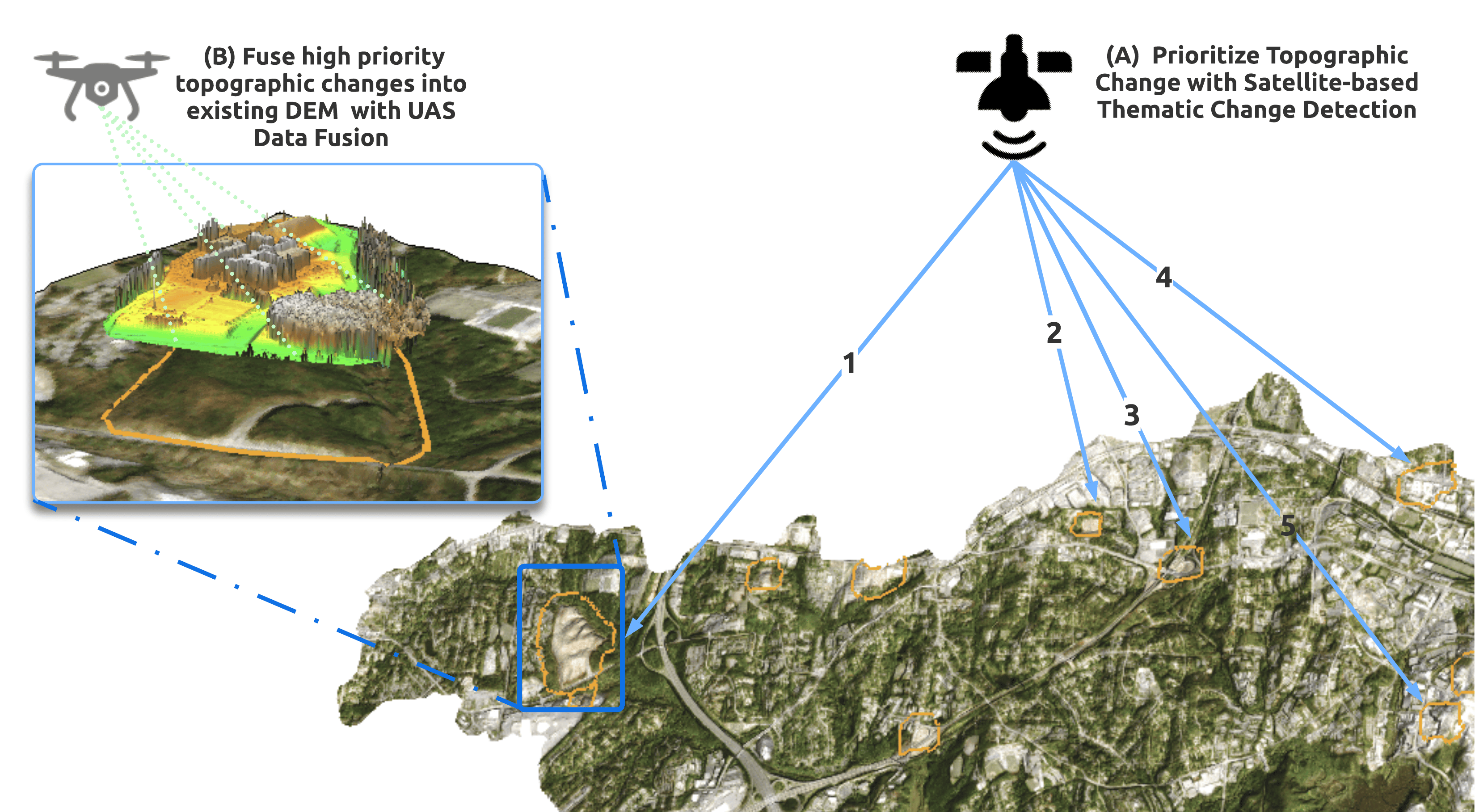
- Integration of UAS with satellite time series for multi-scale change detection
Discussion
- What are the biggest challenges you’ve faced in multi-temporal UAS analysis?
- How can we validate change when ground truth is unavailable?
- What are promising research directions in automated change detection?
Mitasova, Helena, Margery F. Overton, Juan José Recalde, David J. Bernstein, and Christopher W. Freeman. 2009. “Raster-Based Analysis of Coastal Terrain Dynamics from Multitemporal Lidar Data.” Journal of Coastal Research 25 (2): 507–14. https://www.jstor.org/stable/27698342.
Nuth, C., and A. Kääb. 2011. “Co-Registration and Bias Corrections of Satellite Elevation Data Sets for Quantifying Glacier Thickness Change.” The Cryosphere 5 (1): 271–90. https://doi.org/10.5194/tc-5-271-2011.
Sampath, Aparajithan, Mahesh Shrestha, Michelle While, and Victoria Mary Scholl. 2023. Guidelines for Calibration of Uncrewed Aircraft Systems Imagery. Nos. 2023-1033. U.S. Geological Survey. https://doi.org/10.3133/ofr20231033.
Sedaghat, Amin, and Nazila Mohammadi. 2019. “High-Resolution Image Registration Based on Improved SURF Detector and Localized GTM.” International Journal of Remote Sensing 40 (7): 2576–601. https://doi.org/10.1080/01431161.2018.1528402.
Segal, Aleksandr, Dirk Hähnel, and Sebastian Thrun. 2009. Generalized-ICP. https://doi.org/10.15607/RSS.2009.V.021.
Sha, Chunshi, Jian Hou, and Hongxia Cui. 2016. “A Robust 2D Otsu’s Thresholding Method in Image Segmentation.” Journal of Visual Communication and Image Representation 41 (November): 339–51. https://doi.org/10.1016/j.jvcir.2016.10.013.
White, Corey T., William Reckling, Anna Petrasova, Ross K. Meentemeyer, and Helena Mitasova. 2022. “Rapid-DEM: Rapid Topographic Updates Through Satellite Change Detection and UAS Data Fusion.” Remote Sensing 14 (7): 1718. https://doi.org/10.3390/rs14071718.